شبیه سازی های درایو های الکتریکی
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نماییدشبیه سازی های درایو های الکتریکی
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نمایید32 : آموزش تغییر جهت دور موتور تکفاز
همانطور که می دانید استاتور در موتور های تکفاز بر خلاف موتور های القایی سه فاز، میدان الکتریکی گردان تولید نمی کنند لذا کارکرد موتور های القایی سه فاز بهتر از نوع تکفاز می باشد.
به موتور های الکتریکی تکفاز موتور های ضربه ای نیز گفته می شود زیرا جهت تولید میدان در آن شمالی _جنوبی بوده و بایستی با ایجاد انحراف در میدان ، این نیروی شمالی_جنوبی را به نیروی تقریبا گردشی تبدیل کرد.
یکی از این راهها نصب خازن می باشد.
نمونه فن الکتریکی :

پلاک فن به همراه مقدار مورد نیاز خازن
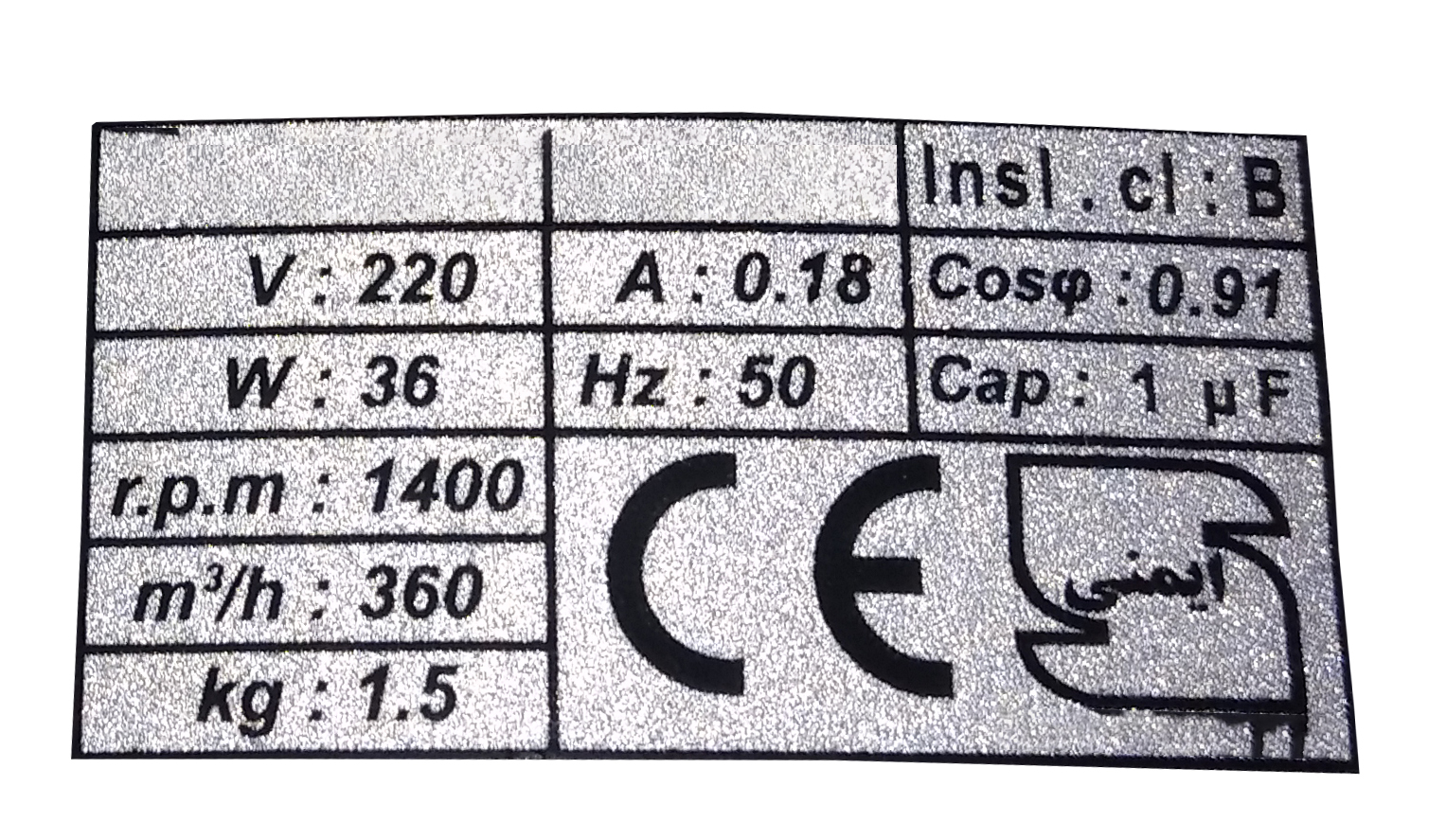
مشاهده می کنید برای یک فن 36 وات از یک خازن 1 میکرو فاراد استفاده شده است.
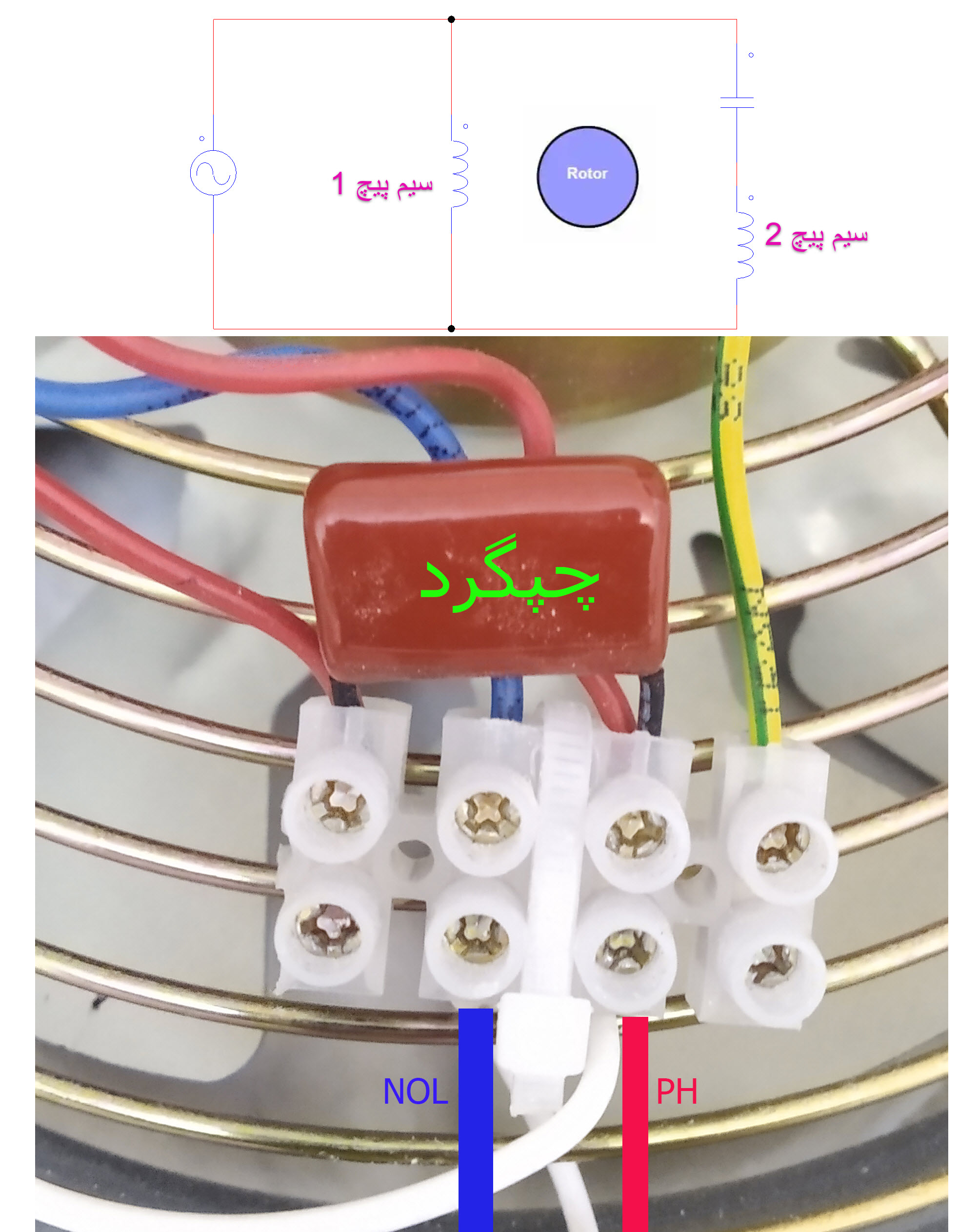
حال برای فن تکفاز که خازن بصورت دایمی باید در مدار باشد ، برای تغییر دور از مدار زیر باید استفاده نمود :



22 : آموزش رسم منحنی موتور القایی در متلب
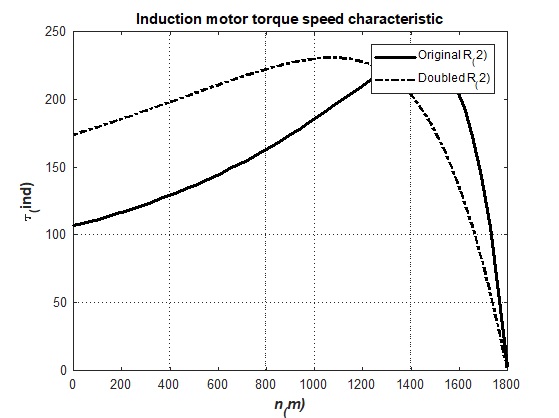
رسم منحنی گشتاور سرعت ماشین القایی
به نحوه نگارتش برنامه توجه کافی داشته باشید
حاوی نکات مهم برنامه نویسی پیشرفته متلب
% M-file: torque_speed_curve.m
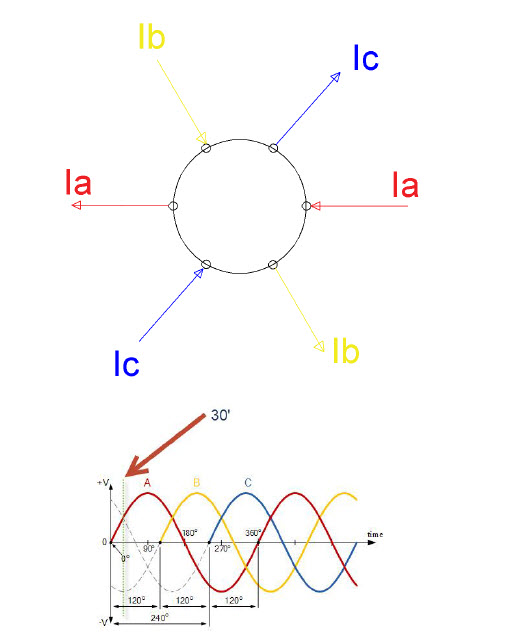
53 نحوه تولید میدان گردان در استاتور موتور الکتریکی سه فاز
همانطور که می دانیم ماشین های القایی به دو مدل سه فاز و تکفاز تولید می شوند . در ماشین های الکتریکی القایی تکفاز بحثی از میدان گردان نسیت و میدان پالسی یا ضربانی تولید می شود یعنی میدان در راستای شمالی جنوبی تقویت و تضعیف می شود .

یک فایل PDF شامل 5 صفحه
مبلغ : 50,000 R
08 شبیه سازی درایو کنترل دور ماشین القایی
تغییر در سرعت ماشین های القایی توسط تغییر در فرکانس انجام می شود. ولی در حین تغییر فرکانس باید نسبت v/f ثابت باشد تا شار در هسته بالا یا پایین نرود. بدین منظور روشی جهت تنظیم سرعت ماشین القایی توسط کنترلر pi در نرم افزار psim طراحی گردیده است .
شبیه سازی درایو کنترل سرعت ماشین القایی سه فاز قفسه سنجابی
چیدمان مدار :

نمودار سرعت و جریان های سه فاز :

شبیه سازی با نرم افزار psim
مبلغ : 350,000R
02 شبیه سازی اینورتر سه فاز با مدولاسیون SPWM
در این شبیه سازی یک اینورتر سه فاز با مدولاسیون SPWM را طراحی نموده و شکل موج را ترسیم نموده و سپس یک موتور القایی سه فاز به آن متصل کرده و آرا راه اندازی نموده و شکل موج ها را ترسیم می نماییم.
شبیه سازی با نرم افزار psim
شماتیک مدار :

نتیجه شبیه سازی :

شبیه سازی در نرم افزار psim
هزینه 300,000R