شبیه سازی های درایو های الکتریکی
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نماییدشبیه سازی های درایو های الکتریکی
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نمایید44 نحوه پیدا کردن نقطه معیوب کابل زیر زمینی قدرت
نحوه عیب یابی اتصالی کابل
در صورتیکه مقاومت سیم به سیم یک کابل قدرت حدود 500 مگا اهم باشد ( روی ولتاژ 500 ولت مگر ) یعنی کابل قدرت خوب است
اگر حدود 300 مگا اهم باشد یعنی متوسط
اگر زیر 100 مگا اهم باشد یعنی وضعیت مناسبی ندارد
همین تست بمنظور هر سیم به زره نیز باید انجام گردد
1 : در ابتدا لازمست توسط دستگاه TDR حدود فاصله اتصالی پیدا شود :

مشخصات فنی:
datasheet_TDR-410-420 EN v1.02.1
قیمت حدودی : TDR 420 SONEL : مبلغ 140,000,000, تومان
Product Description
- Location damaged power cables.
- Fault location copper telecom cables.
- Coaxial cable fault location.
- Fault location wiring infrastructure.
- Detection of breaks, short circuits, damage caused by dampness and other changes in impedance of the cable.
- Graphic depiction of damage the cable with automatic indication the distance to fault on the screen.
Features :
- automatic or manual mode:
- the automatic fault location (AFL),
- mode with manual range selection and sensitivity,
- single measurement triggered manually or scanning continuous,
- 11 available ranges from 7 m to 4000 m selected in manual mode or matched automatically,
- maximum length of cable up to 4000 m one end of the cable,
- "Dead zone" measure limited to 0.5 m,
- 2.5 "LCD screen with backlight,
- scan automatically or manually trigger,
- sensitivity set manually or automatically adjusted,
- adjustable impedance matching,
- propagation coefficient adjustment 1% to 99%,
- waterproof and resistant to mechanical housing.
- small size and weight.
- economical power system - 30 hours of continuously scan on one battery set.
This item includes :
- Black Crocodile Clip 1kV 20A
- M2 Carrying Case
- 1kV Red Crocodile Clip 20A
- Double-Wire Test Lead 0.6m
2 : سپس لازمست مسیر کابل توسط ردیاب کابل مشخص شود :
نمونه ردیاب کابل :





مشخصات فنی :
قیمت حدودی :LKZ2000 _ SONEL : مبلغ 1,100,000,000 تومان
Product characteristics
The LKZ-1500 locator set, consisting of a transmitter and receiver, allows for location, identification and tracking of the route of objects buried in the earth, i.e
- power cords and cables, control cables, telecommunications cables,
- underground elements of lightning protection systems, cathodic protection systems,
- water and sewage systems,
- fuel transmission systems (pipelines, gas pipelines)
- heating systems and pre-insulated pipes.
The sets of LKZ series are an invaluable support in earthworks carried out for various industries, including energy, installation, construction, railway, telecommunications, water and sanitary, heating, geodetic and many others
LKN-1500 transmitter introduces a specific signal to the tracked objects, enabling LKO receivers to route in the active mode. The receivers operate also in a passive mode that uses the network frequencies and telecommunications signals present in the facility
LKO-1500 receiver facilitates the work of the user to with many features, including visualization of the cable routing in the tested object or a greater number of frequencies to choose from. It is also distinguished by the option of tracing cable short-to-earth faults with the use of additional accessories
Transmitter
- Transmission of double frequency signals.
- The mode of limiting the voltage of the transmitted signal.
- Transmitter power: 1 W, 2 W, 5 W, 10 W.
- Operation in direct galvanic or inductive connection mode - internal transmitting antenna.
- Compatible with transmitting clamps.
- Works with Sonel transmitting clamps at frequencies up to 1024 Hz.
- Continuous or interval mode of operation that extends battery life.
- Case housing.
Receiver
- Active mode:
- work with LKN-1500 transmitter at the frequencies of 273 Hz, 526 Hz, 1024 Hz, 8928 Hz, 33 kHz,
- work with transmitters other than LKN-1500 at the frequencies of 491 Hz, 512 Hz, 982 Hz, 2000 Hz, 2048, Hz 8440 Hz, 9828 Hz, 10000 Hz.
- Passive mode – work at the frequencies of:
- 50 Hz, 60 Hz, 100 Hz, 300 Hz, 550 Hz, 1450 Hz,
- RADIO (10...36 kHz),
- SB (48 Hz...14 kHz).
- Location depth up to 10 m.
- Operation with external probes.
Locator functions
- Determine the direction of cable placement, position of the cable relative to the receiver axis (has a compass function).
- Determine the current and residual depth of the cable, both in active mode (with transmitter) and in passive mode (without transmitter).
- Save the route of placing an object on the map. Memory up to 10,000 coordinates.
- Possibility of finding damaged cable locations.
The device, with any GPS module and dedicated program (LKZ Terminal), that is provided with the set, will allow you to plot the route of the underground object and mark the location of single measurement positions on the map. Communication of the LKZ with GPS module is through the Bluetooth
Sonel LKZ Terminal
The application works with the Sonel LKZ-1500 wire and cable locator. By replacing the external GPS module, it allowing the user to define and record the geographic coordinates of the cable route
The application additionally enables
- live positioning preview,
- measuring the distance to a specific point on the route,
- export of routes saved in LKO-1500 to the phone’s memory,
- reading routes from the phone’s memory,
- preview of the saved values of all parameters,
- data export to PC
Sonel LKO Terminal
A dedicated PC program for handling data stored in Sonel LKO-1500. It allows you to map a route from your location and read the data stored in the receiver
The data includes
- coordinates of the place of measurement according to GPS information,
- reading the depth of the object and value of current flowing in it,
- the direction of the forced current,
- operating frequency,
- date and local time at the time of measurement according to GPS information,
- export of route data to a file.
3 : سپس با داشتن فاصله و مسیر کابل منطقه مورد نظر مشخص می شود
حال لازمست نقطه دقیق آن مشخص شود پس توسط دستگاه فرستنده پالس ، پالس به کابل ارسال می شود و توسط گیرنده نقطه مورد نظر مشخص می شود :
یکی از این دستگاه ها دستگاه زیر می باشد :
Tanbos T20 TDR 0-35KV Underground Power Cable Fault Location System Locator Equipment Tester Detector



لازم بذکر است مقاومت 1 کیلومتر سیم نمره 35 برابر 1.14 خواهد بود
43 آموزش محاسبه بانک خازنی از روی قبض
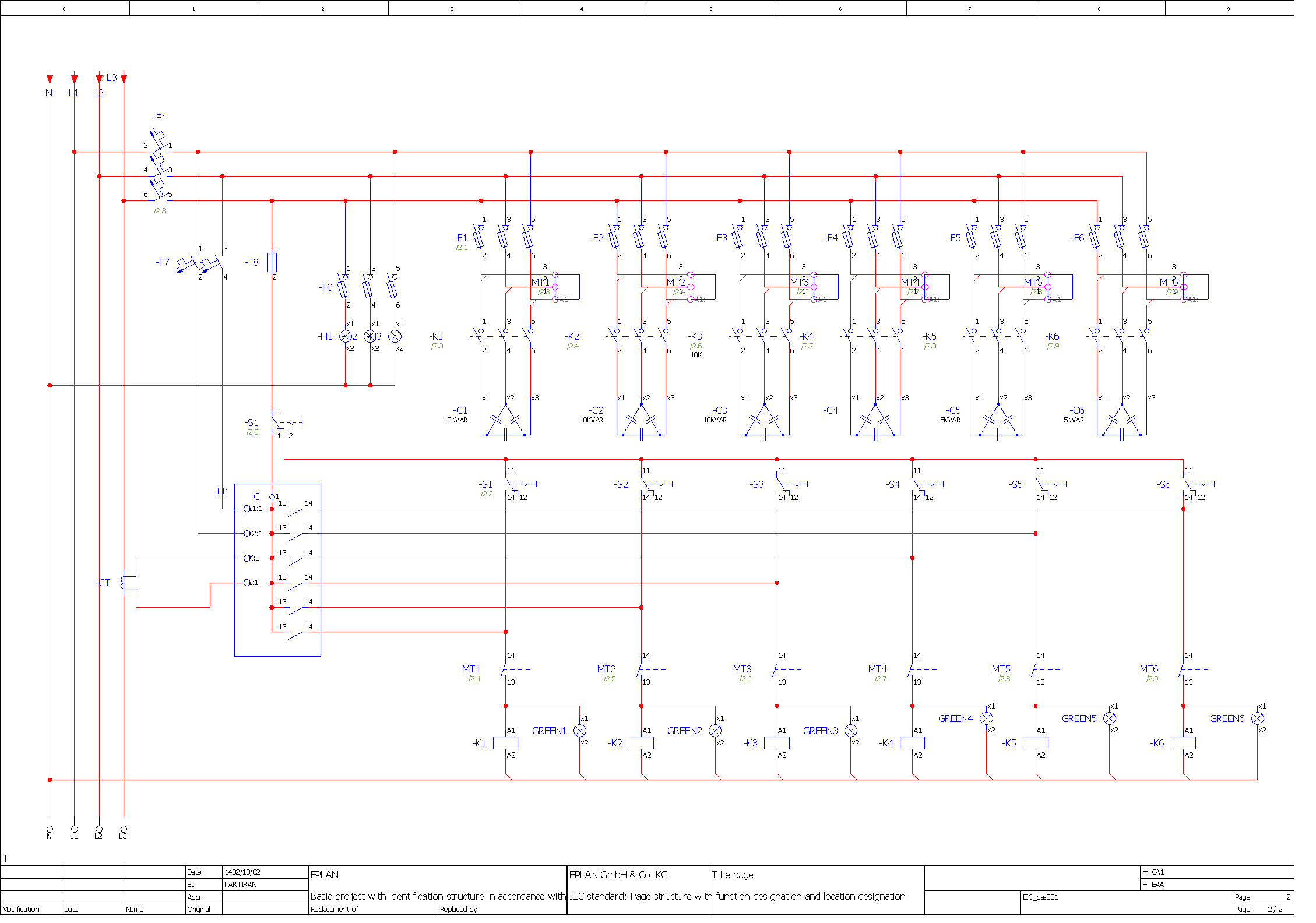
در این تصویر نحوه محاسبه بانک خازنی نمایش داده می شود :

در صورتیکه کنتور اولیه باشد ( سمت 20 کیلوولت ) لازمست برای خود ترانس یک خازن پله ثابت در نظر گرفته شود. بدین صورت که به ازای هر 40KVA قدرت ترانسفورماتور، 1KVAR خازن در نظر گرفته شود. مثلا برای ترانسفورماتور 400KVA یک خازن 10KVAR مناسب می باشد.
نمونه رگولاتور المانی بانک خازنی :

بمنظور ورود به برنامه های 200 الی 600 pin = 242
سپس کدهای زیر را تنظیم نمایید
کد 307 باید yes باشد
کد 308 باید yes باشد تا بتوان کد 402 را auto نمود
برای وارد کردن مقدار KVAR هر پله بانک خازنی بایستی کد 402 را تنظیم نمود
برای تنظیم وضعیت پله های بانک خازنی 1 الی اخر کد 403 باید تنظیم شود
وضعیت AUTO یعنی هر پله خازن به نوبت در سرویس قرار می گیرد تا پاور فکتور به مقدار تنظیمی برسد
وضعیت FOFF یعنی این پله خازنی همیشه خاموش است
وضعیت FON یعنی این پله خازنی همیشه روشن است
نمونه نقشه اولیه از تابلو بانک خازنی :



42 آموزش تست لودسل 30 تن
معمولا در باسکول های 60 تنی از 6 یا 8 لودسل 30 تنی استفاده می شود که هر جفت لودسل در سمت چپ و راست باسکول قرار می گیرد
لودسل های مرسوم در بازار با اهم 1000 یا 650 یا 350 می باشند
برند های مطرح شامل:
KELI چین

SARTERIOUS آلمان _ هند


از شرکت های معتبر در این زمینه :
فراسوتوزین :
https://www.farasooeng.com/
توزین الکتریک :
https://www.towzin.com/
صبا سنجش :
https://sabasanjesh.com/
پند :
https://pandcaspian.com/?gclid=EAIaIQobChMI1bWgz8qcgAMVGJRoCR3SXwXWEAAYASAAEgJosPD_BwE
نحوه تست :
لودسل 1000 اهمی را در نظر بگیرید
وقتی مقاومت ورودی ( متصل به منبع تغذیه در حالت بی برقی معمولا سیم های قرمز ابی و یا قرمز مشکی ) را می گیریم باید حدود 5 الی 8 درصد بالاتر باشد: یعنی مقاومت ورودی باید بین 1050 الی 1080 اهم باشد
برای مقاومت خروجی ( معمولا سیم های سبز طوسی ) هم باید حداکثر 0.3 درصد تلرانس نسبت به 1000 اهم داشته باشد یعنی بین 997 الی 1003 اهم
در صورتیکه مقاومت ها در این رنج نباشند یعنی لودسل معیوب شده است
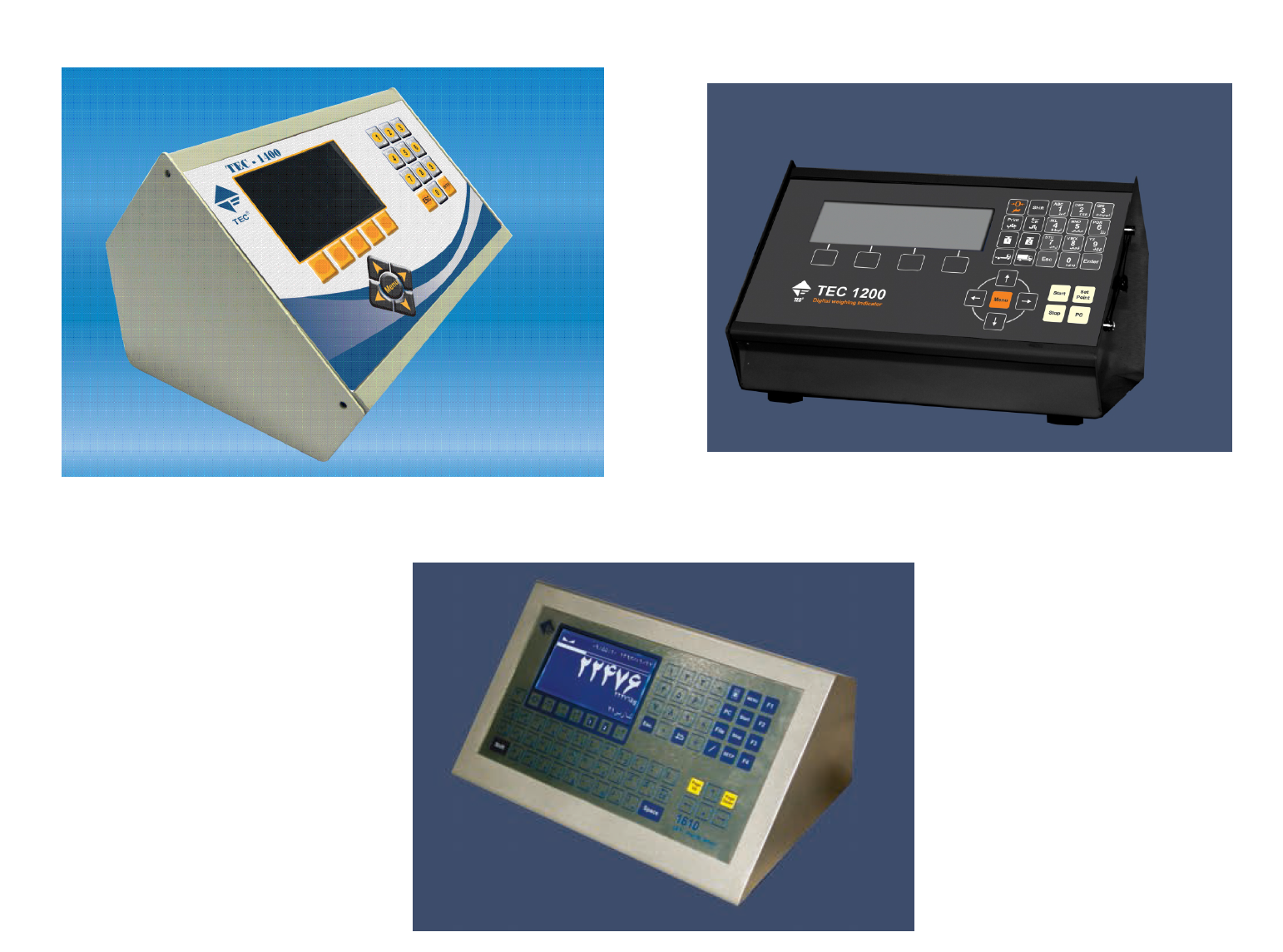
دانلود دفترچه راهنمای TEC1200 توزین الکتریک
دانلود دفترچه راهنمای TEC1400 توزین الکتریک
دانلود دفترچه کاتالوگ TEC1610 توزین الکتریک
دانلود دفترچه راهنمای TEC1610 توزین الکتریک

دانلود دفترچه راهنمای GAMMA 07c

41 آموزش سانترال KX-TES824
روش ضبط صدای سانترال و ضبط پیغام تلفن گویا سانترال پاناسونیک
آموزش تغییر صدای تلفن گویای سانترال پاناسونیک و ضبط پیام ورودی سانترال برای منشی تلفنی یا همان تلفن گویا روی سانترال KX-TES824 با تلفن مدیریتی KX-T7730 و ضبط صدای تلفن گویا سانترال های پر ظرفیت TDA و TDE با تلفن KX-T7665 و دیگر تلفن های دیجیتال مانند KX-DT333 به همراه روش ضبط پیام لایه های زیرین تلفن گویا:
روش ضبط پیام تلفن گویا روی سانترال KX-TES824 و KX-TEM824
برای انجام این کار باید ابتدا با تلفن مدیریتی KX-T7730 به پورت مدیریتی دستگاه متصل شوید و پس از آن برای ضبط صدای تلفن گویا به شکل زیر عمل نمایید. برای پیام اصلی یا همان پیام ورودی و خوش آمد گویی:
1. ابتدا کلید program را انتخاب کنید
2. عدد 9 راوارد نمایید
3. عدد 1 را وارد کنید
4. مجددا عدد 1 را وارد کنید
5. پس از شنیدن صدای بوق پیام خود را ضبط کنید
6. کلید store را در پایان برای ذخیره وارد کنید.
برای پیام لایه های بعدی تلفن گویا:
پیام لایه های بعدی زمانی استفاده می شود که شما پس از پیام خوش آمد گویی و شماره گیری یک عدد کاربر را به یک مقصد خاص متصل نکنید، برای مثال پس از پیام خوش آمد گویی کاربر برای ارتباط با واحد فروش عدد یک را شماره گیری کرده است و در این شرایط ما یک منوی تلفنی دیگر برای معرفی بخش های مختلف واخد فروش داشته باشیم. در این شرایط پیام مربوط به منو های زیرین به این شکل ضبط می گردد.
1. ابتدا کلید program را انتخاب کنید
2. عدد 9 راوارد نمایید
3. عدد 3 را وارد کنید
4. عدد 1 (شماره زیر منو) را وارد کنید
5. وارد نمودن ستاره (*)
6. پس از شنیدن صدای بوق پیام خود را ضبط کنید
7. کلید store را در پایان برای ذخیره وارد کنید.
به این ترتیب می توانید پیام مورد نظر خود را برای معرفی شرکت و بخش های مختلف مجموعه خود نظیر واحد فروش، پشتیبانی و غبیره به مشتریان معرفی نمایید و در صورت لزوم پیام های مرتبط با منو های دیگر را نیز ضبط نمایید.
منبع
https://kimiaertebat.ir/%D8%B5%D8%AF%D8%A7%DB%8C-%D8%AA%D9%84%D9%81%D9%86-%DA%AF%D9%88%DB%8C%D8%A7-
%D8%B3%D8%A7%D9%86%D8%AA%D8%B1%D8%A7%D9%84.html
تنظیمات منشی تلفنی پاناسونیک ۸۲۴ (سانترال پاناسونیک ۸۲۴ کم ظرفیت)
در این بخش میخواهیم تنظیمات منشی تلفنی سانترال ۸۲۴ یا دیزا را به شما آموزش بدهیم.
با مطالعه این مطلب ابتدا می توانید اطلاعاتی در مورد مزایای استفاده از منشی تلفنی و با مشاهده آموزش عملی و کد هایی که در اختیار شما قرار داده می شود، می توانید به راحتی این قابلیت را روی دستگاه خود فعالسازی یا غیرفعال نمایید.
معرفی دیزا یا همان منشی تلفنی سانترال ۸۲۴
همانطور که که از اسمش پیداست این سانترال قابلیت این را دارد که تماسهای ما را پاسخگو باشد و مانند یک منشی بتواند تماسها را به قسمت ها یا بخش های مختلف وصل کند.
مثلاً در یک شرکتی ما قسمت ها یا بخش های مختلفی داریم که می توانیم با برنامه ریزی و فرمان هایی که به دستگاه می دهیم ، تماس گیرنده یا مشتری را به سمت داخلی مورد نظر هدایت کنیم.
در سانترال های TES 824 /TEM 824 یک کانال دیزا یا منشی تلفنی به صورت همزمانی داریم که اگر دو تماس همزمان داشته باشیم، این سانترال پاناسونیک قابلیت این را دارد که یک تماس را جواب بدهد و روی اپراتور خودکار برود و اگر که ما بخواهیم این قابلیت را افزایش بدهیم باید یک کارت دیزا روی دستگاه مان نصب کنیم.

برنامه ریزی منشی تلفنی سانترال ۸۲۴
در این مرحله روی دستگاه کد های مورد نظر را وارد می کنیم و مراحل کار را یک به یک توضیح میدهیم.
جهت برنامه ریزی باید گوشی ۷۷۳۰ داشته باشید و قبلاً گفتیم که برنامه ریزی روی جک ۰۱ است.
پروگرام را میزنیم ستاره مربع و سپس پسورد دیفالت دستگاه که ۱۲۳۴ می باشد.
کد ۴۱۴: تغییر وضعیت خط شهری
در حالت برنامه ریزی اولین کد مورد نیاز ما ۴۱۴ می باشد تا حالت تماس های ورودی را به دیزا تغییر دهیم.
یعنی از هر طرف خطوط شهری با مرکز تماس گرفته شد، ابتدا پیغام دیزا برای مشتریان پخش می شود.
کد ۴۱۴ را وارد می کنیم، sp-phone را جهت تأیید برنامه می زنیم و دستگاه به ما می گوید که دیزا یا منشی تلفنی را می خواهید برای کدام خط شهری فعال کنید.
به صورت پیش فرض همه خطوط روی حالت نرمال قرار دارند و با کلید AUTO ANS می توانیم حالت دیزا را برای آن ها انتخاب کنیم.
در صورتی کعه بخواهیم دیزا را برای همه خطوط شهری فعال کنیم، می توانیم از کلید ستاره در این مرحله استفاده نماییم.
ما معمولاً ۸ تا OGM داریم روی این دستگاه که معمولاً OGM یک را انتخاب میک نیم و دکمه استور را جهت تأیید این برنامه وارد می کنیم.
بعد از این کار و سیو شدن تنظیمات انجام شده، تلفن ۷۷۳۰ بوق ممتد می زند و دکمه هلد را می زنیم تا از این کد خارج شویم.
کد ۵۰۰:
حالا کد ۵۰۰ را جهت وارد کردن اعداد تک رقمی میزنیم.
کد ۵۰۰ دیزا را وارد می کنیم و اسپیفون را میزنیم در حالت دیفالت دستگاه در حالت Whit AA است.
در این حالت دستگاه فقط یک پیغام را برای مشتری پخش می کند و مشتری نمی تواند شماره ای را برای شماره گیری فشار دهد و به جایی وصل شود.
با دکمه اتو انس این حالت را تغییر می دهیم روی حالت Whit A می گذاریم و استور را مجدد می زنیم.
کد ۵۰۱: تعیین مسیر برای شماره های ورودی منشی تلفنی سانترال ۸۲۴
کد ۵۰۱ جهت وارد کردن اعداد تک رقمی است، اعداد تک رقمی ما که مهمترین بخش ما هست.
مثلاً من با فروشگاه PBXSHOP تماس می گیرم، پیغام منشی تلفنی پخش می شود، جهت ارتباط با مدیریت عدد یک، حالا عدد یک به کدام داخلی باید وصل شود؟ عدد ۲ قسمت مالی، مالی کدام داخلیهای ما هست؟ ما به دستگاه فرمان می دهیم که به کدام داخلی یا به کدام جک ما وصل شود.
مثلاً عدد یک به جک ۰۱ و استور را جهت تأیید میزنیم. ما می توانیم از اعداد صفر تا ۹ داشته باشیم و تعاریف مورد نظرمان را انجام بدهیم. پس به عنوان مثال عدد ۳ را من میخواهم به جک ۰۴ که داخلی ۱۰۴ هست ارتباط بدهم، جک مورد نظرم را انتخاب میکنم و ۰۴، دکمه استو را میزنم.
در برنامه های دیزا کدهای زیادی داریم.

کد ۵۰۴: تاخیر در پخش پیغام منشی تلفنی سانترال ۸۲۴
حالا کدی که بر ای راه اندازی منشی تلفنی سانترال ۸۲۴ خیلی مورد استفاده قرار می گیرد کد ۵۰۴ ما هست که میزان تأخیر در پخش دیزا مورد نظر ما بعد از وصل شدن مشتری به خط شهری می باشد.
دستگاه تایمی دارد که بعد از زنگ خوردن، بعد از چه تایمی بتواند روی آن پیغام مورد نظر برود.
در حالت دیفالت سه ثانیه هست که ما این تایم را به صفر تبدیل می کنیم تا بلافاصله بعد از وصل شده به خط شهری، پیغام منشی تلفنی برای مشتری پخش شود.
تا اینجا ما توانستیم برنامه های مربوط به دیزا یا منشی تلفنی را انجام بدهیم حالا نوبت به ضبط پیغام خوشامدگویی ماست،
تلفن سانترال پاناسونیک و بررسی انواع آن
ضبط پیغام دیزا یا همان منشی تلفنی پاناسونیک ۸۲۴
جهت ضبط پیغام منشی تلفنی ابتدا باید پروگرام را بزنیم.
کد 91 مربوط به ضبط پیغام خوشامدگویی است.
حالا OGM مورد نظر ما یا پیغام مورد نظر ما اینجا خودمان مشخص میکنیم پیغام یک ما باشد یا پیغام ۸ ،ما ۸ تا پیغام میتوانستیم روی این دستگاه ضبط کنیم.
پیغام یک را میزنیم و بعد از مدت زمان کوتاهی گوشی را برداشته و اقدام به ضبط منشی تلفنی گویا بر روی تلفن ۷۷۳۰ می کنیم.
در پایان برای ذخیره شدن پیغام مورد نظر کلید STORE را فشار می دهیم.

به محض این که دکمه استور را بزنیم پلی بکش دوباره پخش می شود و می توانیم گوش کنیم.
اگر خواستیم دوباره مجدداً این کار را انجام بدهیم و حالا به هر نحوی پیغام ما دچار مشکل بود، دوباره همین عمل را تکرار می کنیم.
برای گوشی دادن پیغام های ضبط شده روی تلفن ۷۷۳۰ بعد از فشار دادن کلید PROGRAM کلید ۹۲، شماره دیزا مورد نظر ر ا وارد می کنیم تا پیغام مورد نظر پخش شود.
در صورتی که بخواهیم پیغام ضبط شده را حذف نماییم بعد از پروگرام از عدد ۹۰ و سپس شماره OGM مورد نظر استفاده می کنیم.
در پکیج آموزش جامع سانترال ۸۲۴ نحوه فعالسازی مرحله به مرحله و کامل منشی تلفنی سانترال ۸۲۴ از طریق تلفن و نرم افزار برنامه ریزی این دستگاه آموزش داده شده است.
منبع :
https://pbxshop.co/disa-cancel/
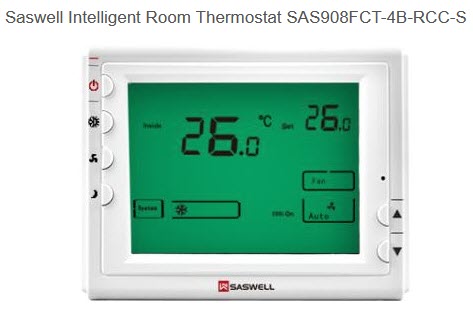
40 آموزش سیم بندی ترموستات ساسول SASWELL
در این بخش کاتالوگ مربوط به این ترموستات را می توانید مشاهده نمایید
در صورت نیاز به مشاوره بیشتر تماس بگیرید
کاتالوگ های مربوط به ترموستات SASWELL جهت دانلود :
آدرس بخشی از منابع :
https://www.manualslib.com/manual/1823475/Saswell-Sas908fct-4b-S.html
40 فرم های نظام مهندسی
فرم های سامانه سپامک:
ارتقا پایه شامل کاربرگ شماره 2 و ...
ثبتنام برای اولین بار کاربرگ شماره 2 و ...
فرم های شهرداری :
ضوابط و مقررات شهرسازی و ساختمانی طرح تفصیلی شهر
فرم های نظام مهندسی :
چک لیست نظارت سیستم های کشف و اعلام حریق
فرم استعلام شرایط واگذاری انشعاب برق
فرم تایید مهندس ناظر برق ساختمان جهت درخواست انشعاب برق
فرم شماره یک کنترل اجرای تاسیسات الکتریکی ساختمان در مرحله فونداسیون
فرم شماره دو (سقف) کنترل اجرای تاسیسات الکتریکی ساختمان
فرم شماره سه کنترل اجرای تاسیسات الکتریکی ساختمان در مرحله نازک
کاری (لوله گذاری و قوطی گذاری )
فرم شماره پنج کنترل اجرای تاسیسات الکتریکی ساختمان در مرحله نازک
کاری (پایان کار)
فرم های تعهد از مجری و مالک :
فرم تاکید بیشتر بر اجرای نکات مهم برق ساختمان به مالک، مجری و برقکار
آیین نامه های وزارت تعاون، کار و رفاه اجتماعی :
آیین نامه حفاظتی تاسیسات الکتریکی در کارگاه ها
آیین نامه ایمنی سیستم اتصال به زمین (ارتینگ)
ایین نامه حفاظتی کارگاه های ساختمانی
دستور العمل های شورای مرکزی
اجرای سیستم زمین در ساختمان ها
اجرای همبندی اضافی در ساختمان ها
اندازه گیری مقاومت الکترود زمین
تست و تحویل تاسیسات برقی ساختمان ها
دستورالعمل اجرای سیستم های اتوماسیون و کنترل ساختمان
سایت های پر کاربرد :
فرم های سایت نظام مهندسی اصفهان
سامانه سینا نظام مهندسی اصفهان
سایت نظام مهندسی استان اذربایجان غربی
وزارت تعاون، کار و رفاه اجتماعی
38 : آموزش تحلیل آزمون نظام مهندسی نظارت 99
تحلیل آزمون نظام مهندسی نظارت 99
تحلیل آزمون نظام مهندسی برق نظارت ۱۴۰۱
تحلیل آزمون نظام مهندسی نظارت 95
تحلیل آزمون نظام مهندسی نظارت 1400


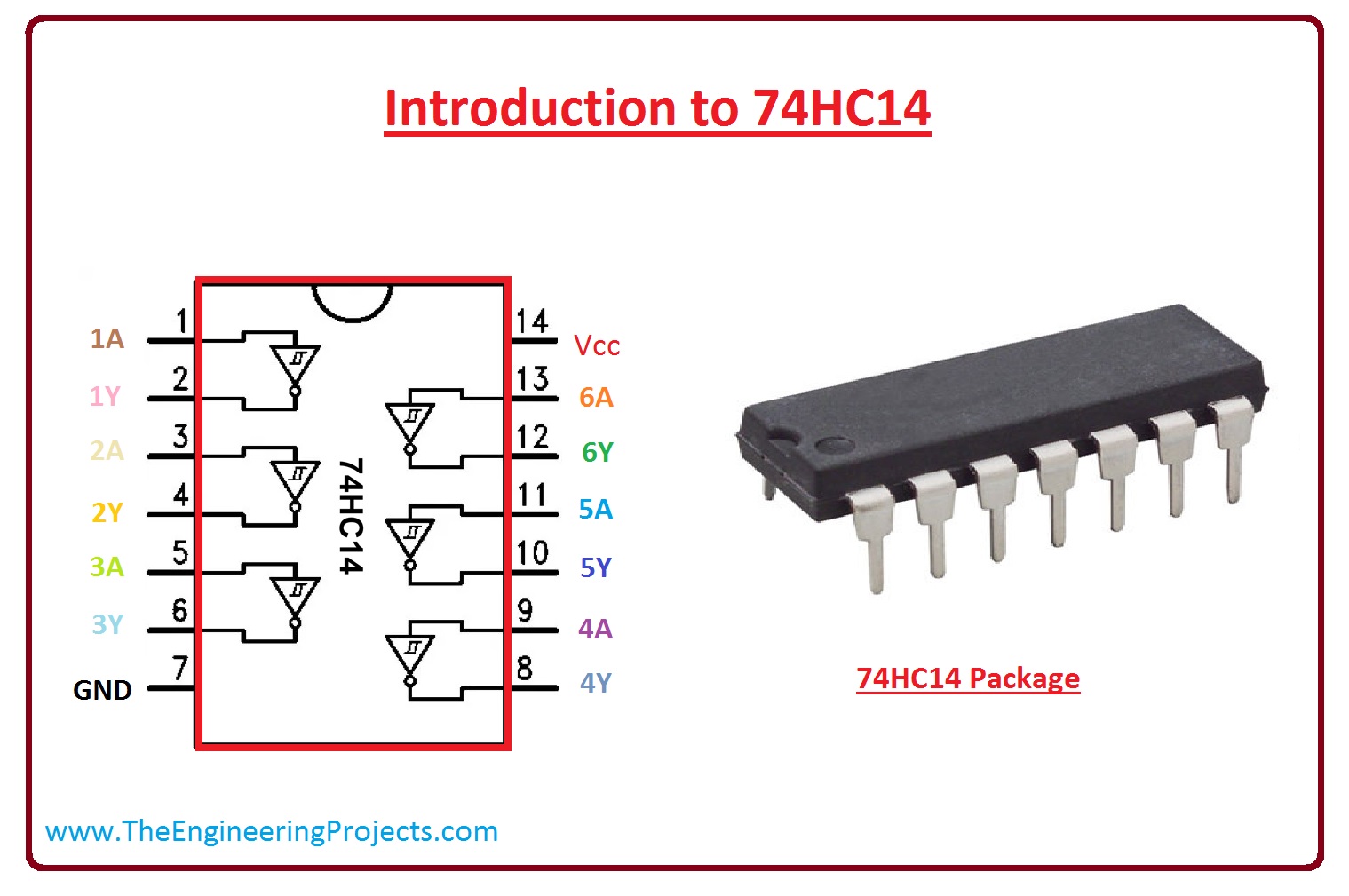




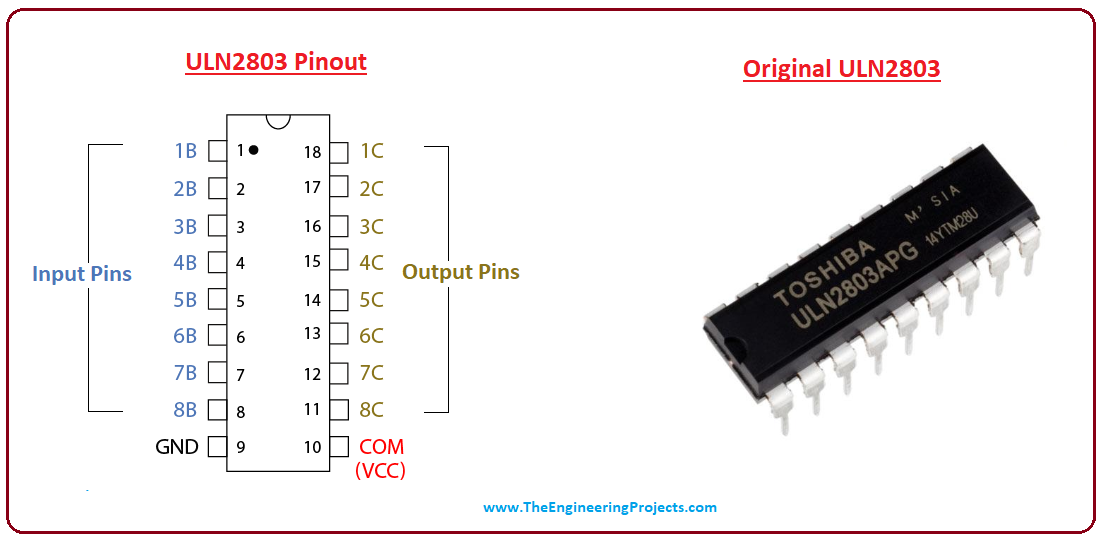
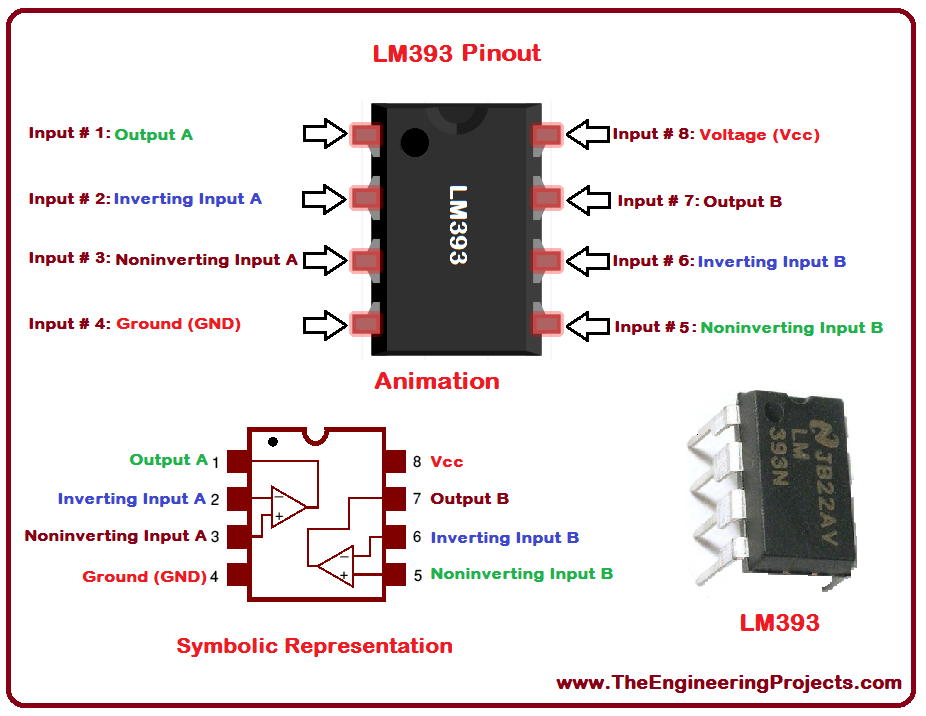
34 : معرفی تعدادی IC بخش سوم
معرفی تعدادی IC معروف به همراه کاتالوگ
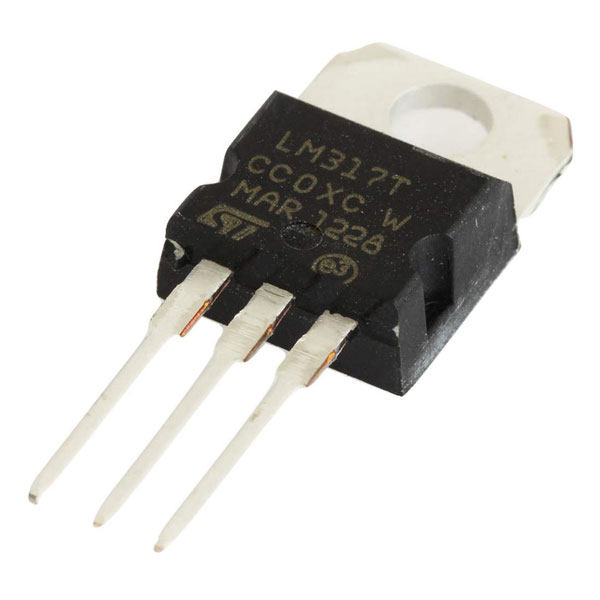
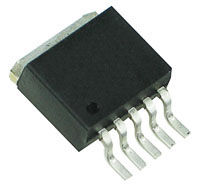
رگولاتور ولتاژ
این آی سی جهت ارتباط RS232 کارایی دارد
حافظه فلش

رم استاتیک


L293DD
MOTOR DRIVE H BRIDGE

مقایسه گر تفاضلی
مدار کنترلی FPGA

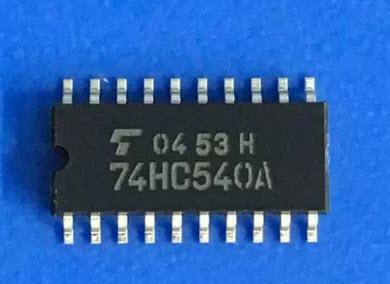
MC74HC245A


مدار مجتمع

PCA82C251
پرتکل CAN-24VDC

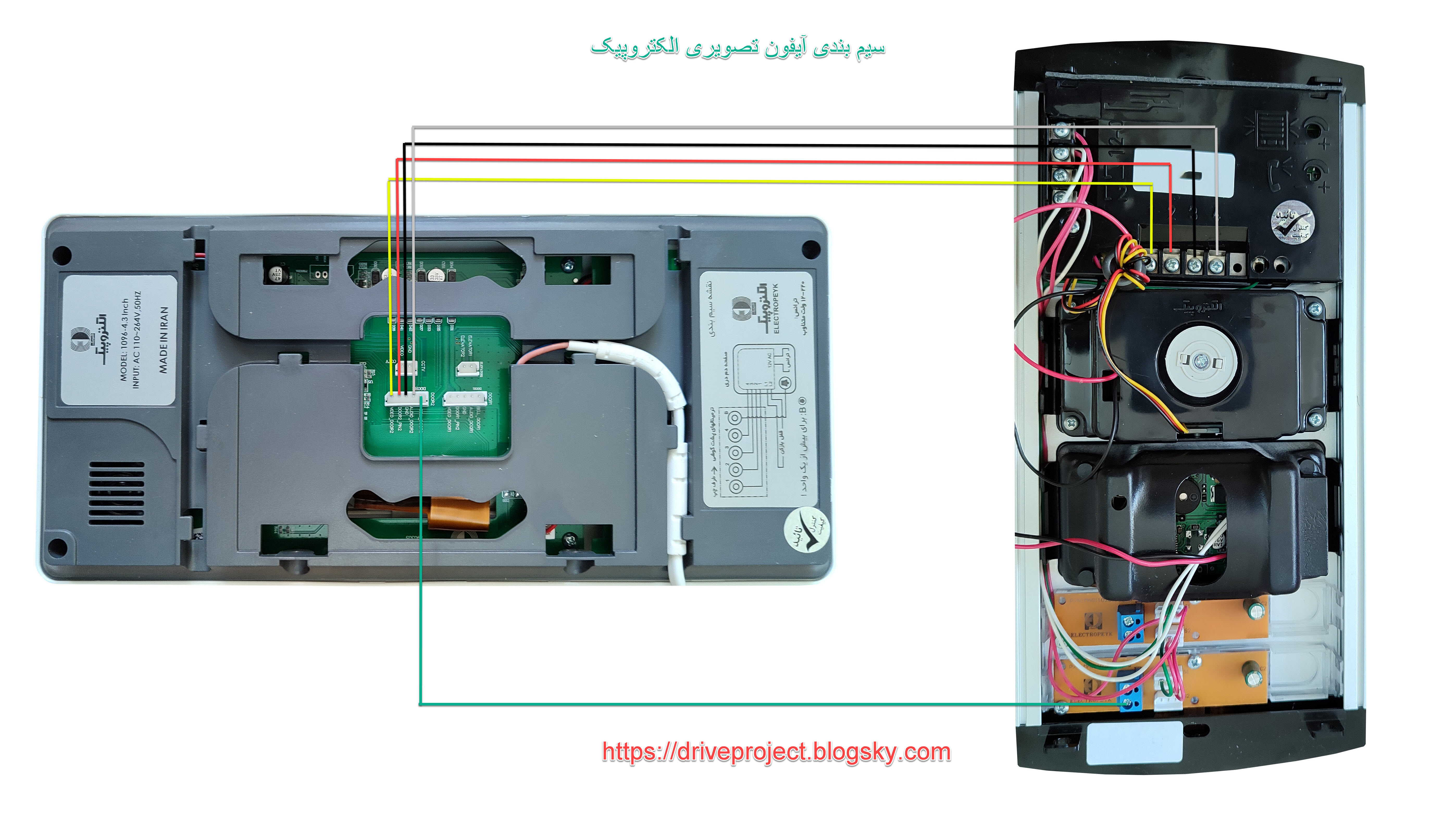
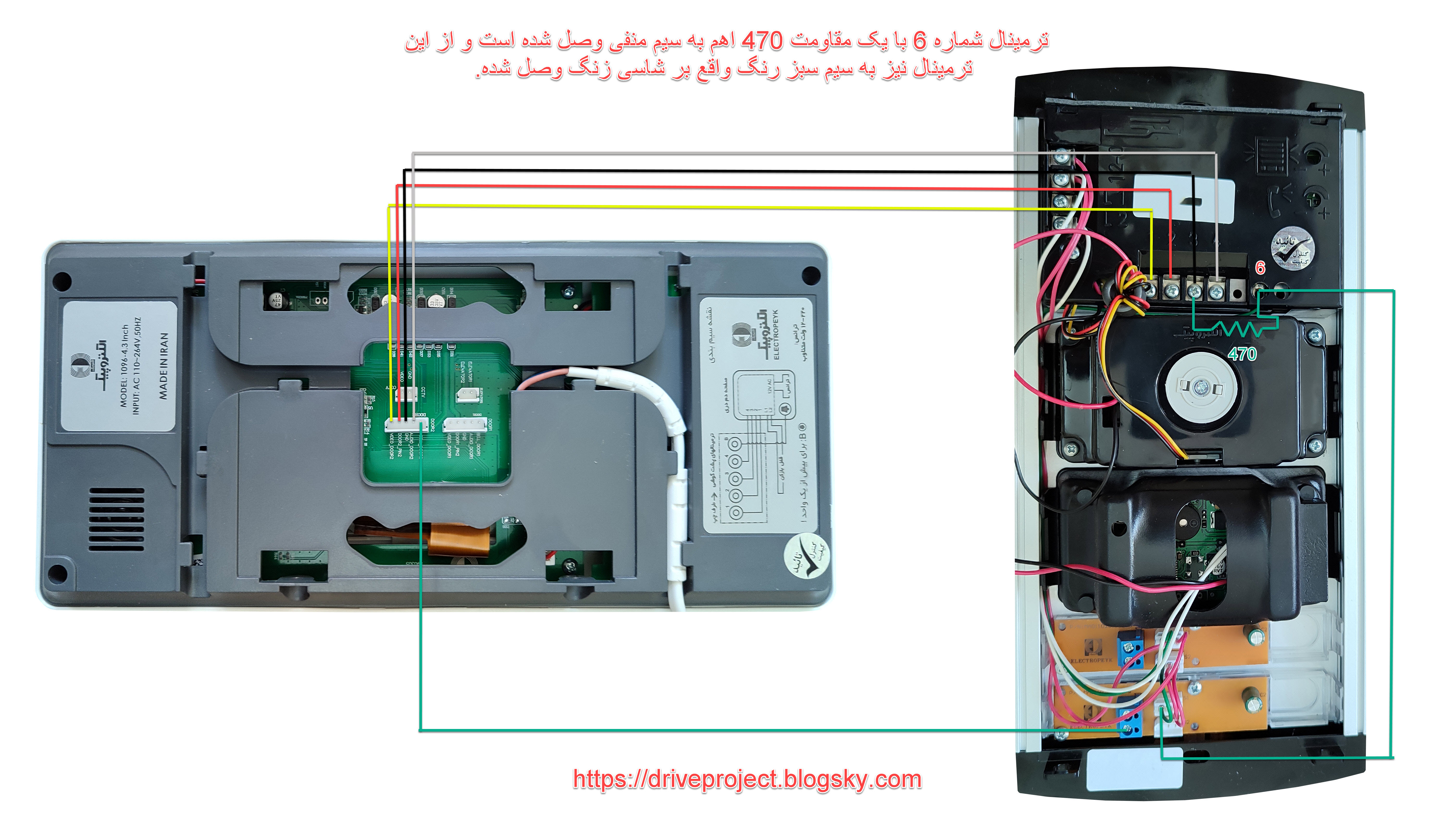
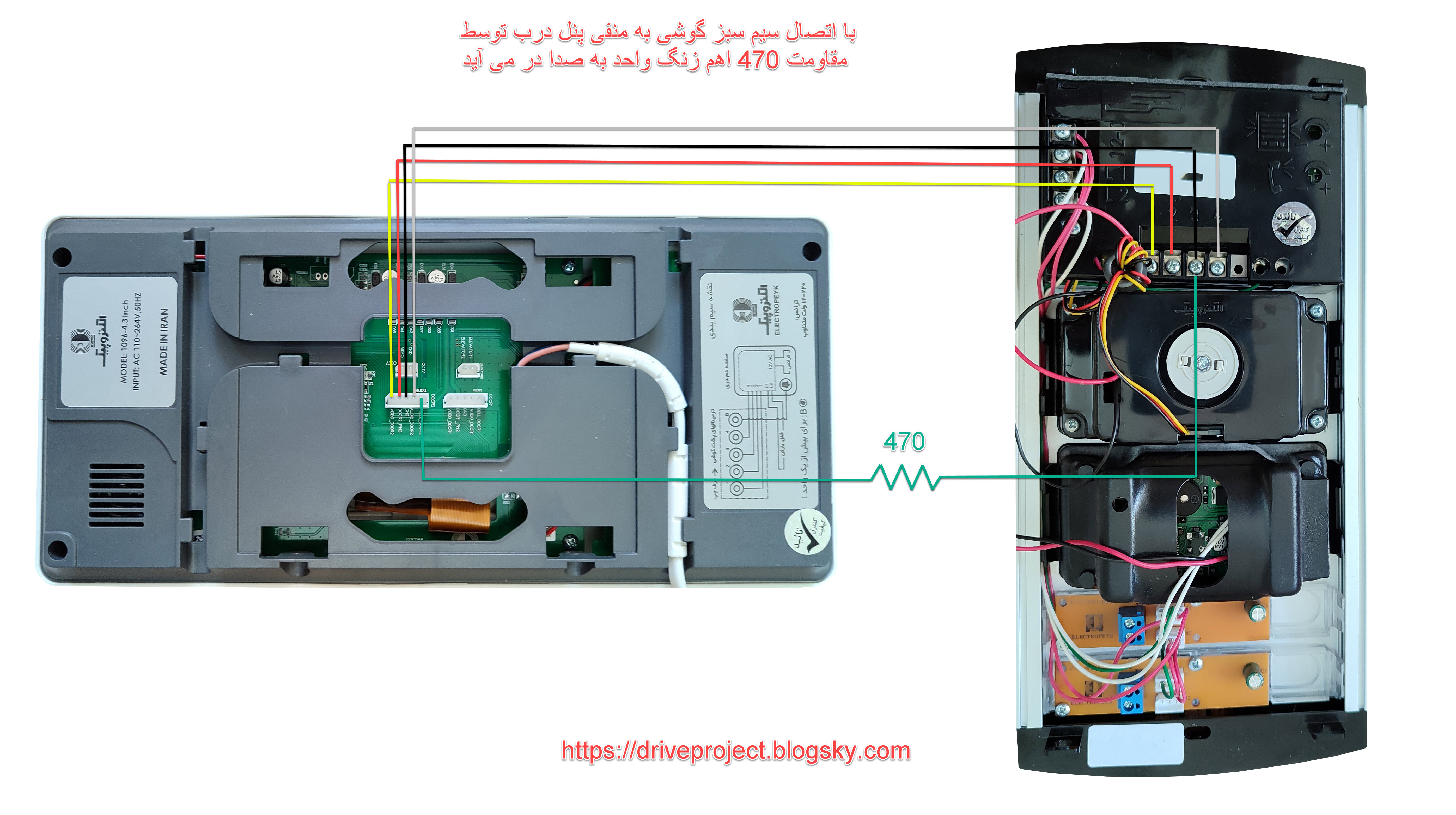
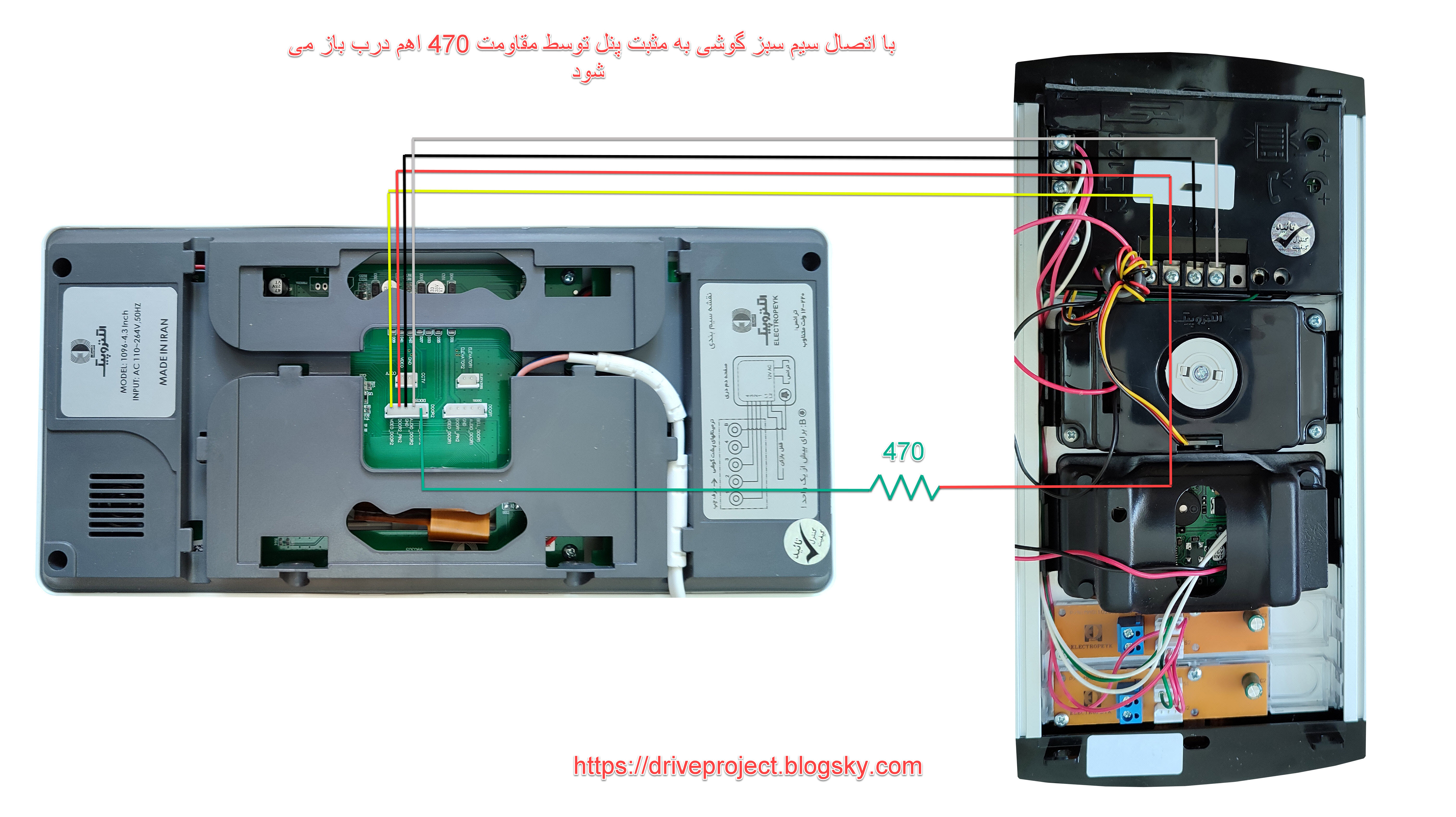
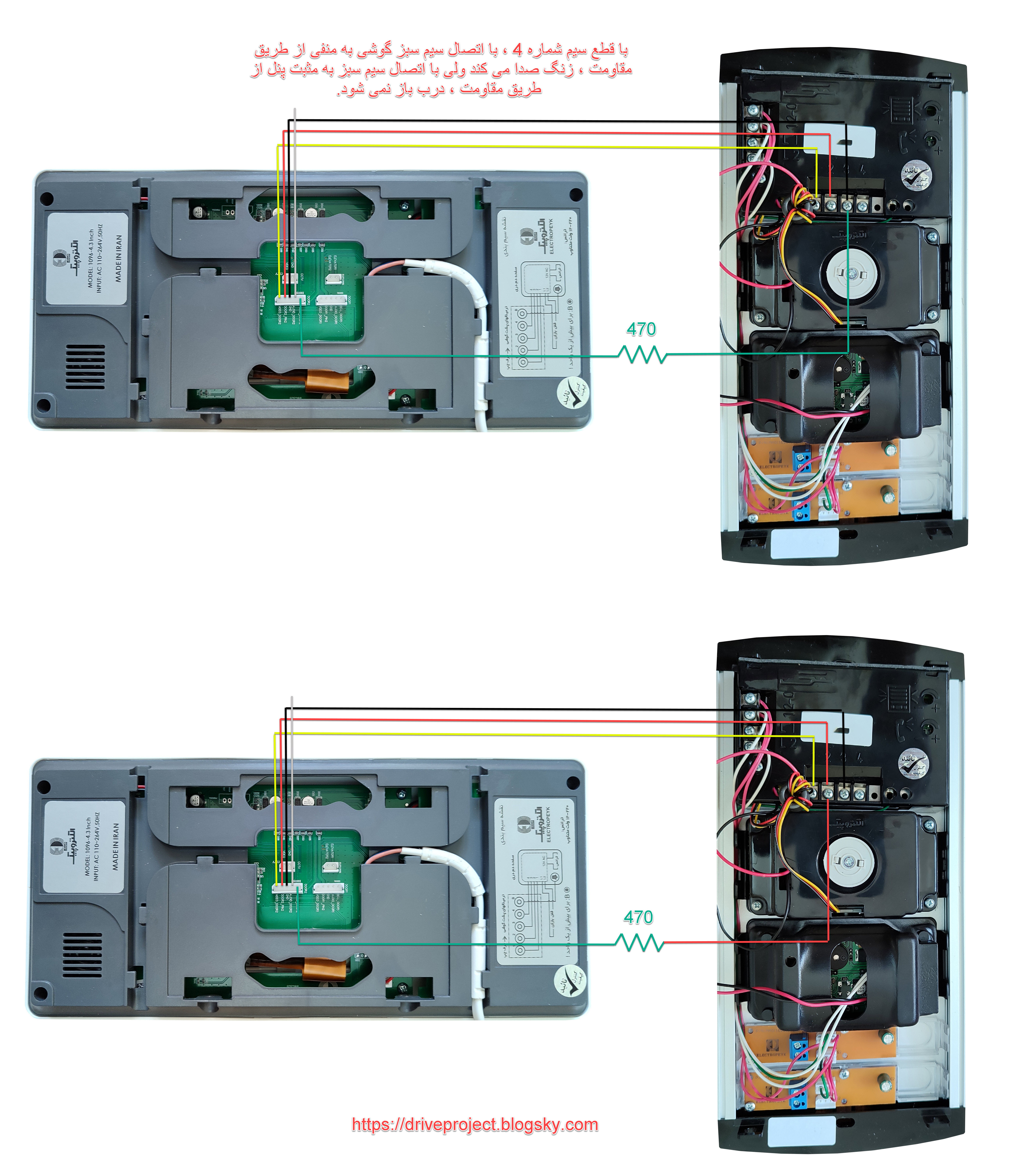
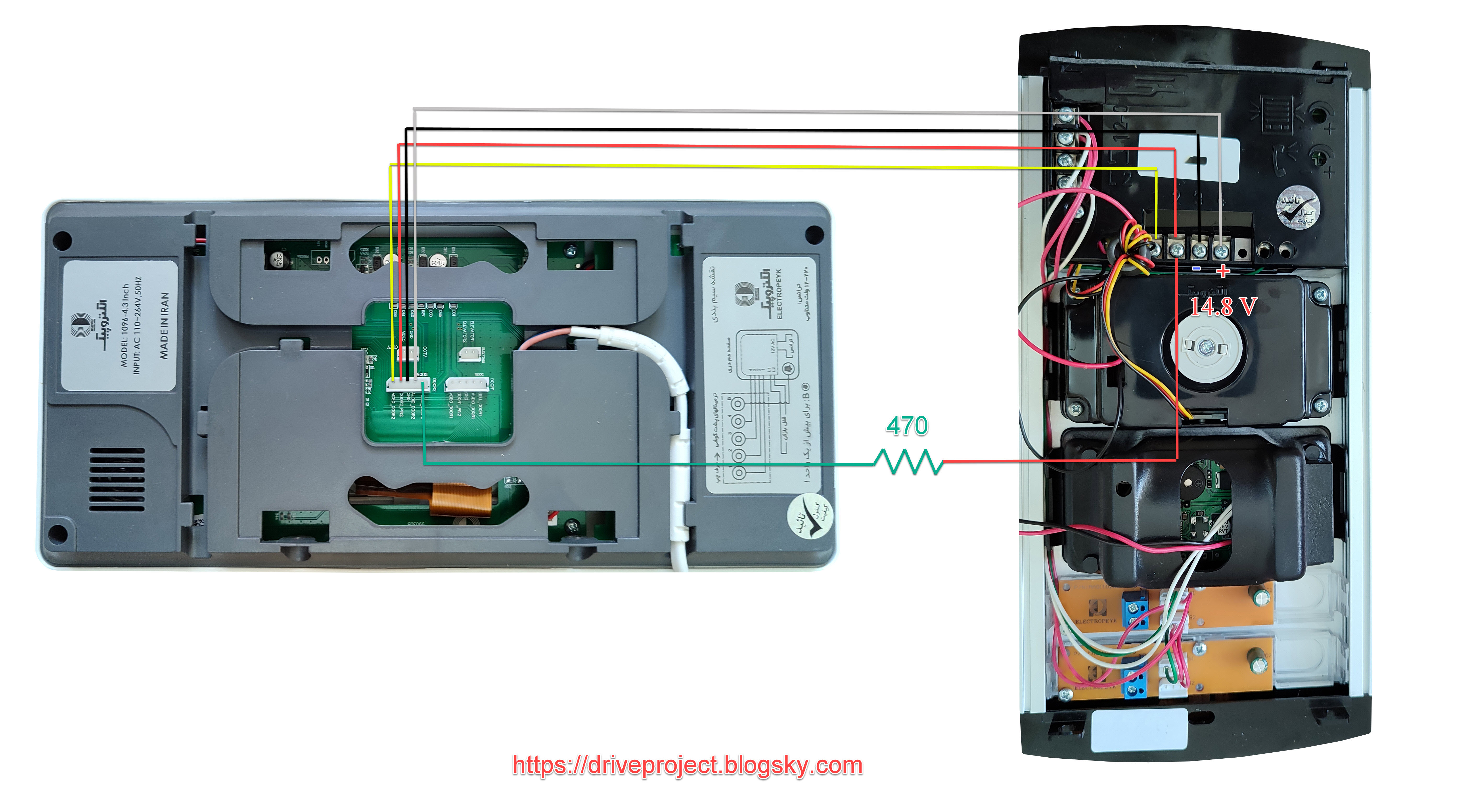
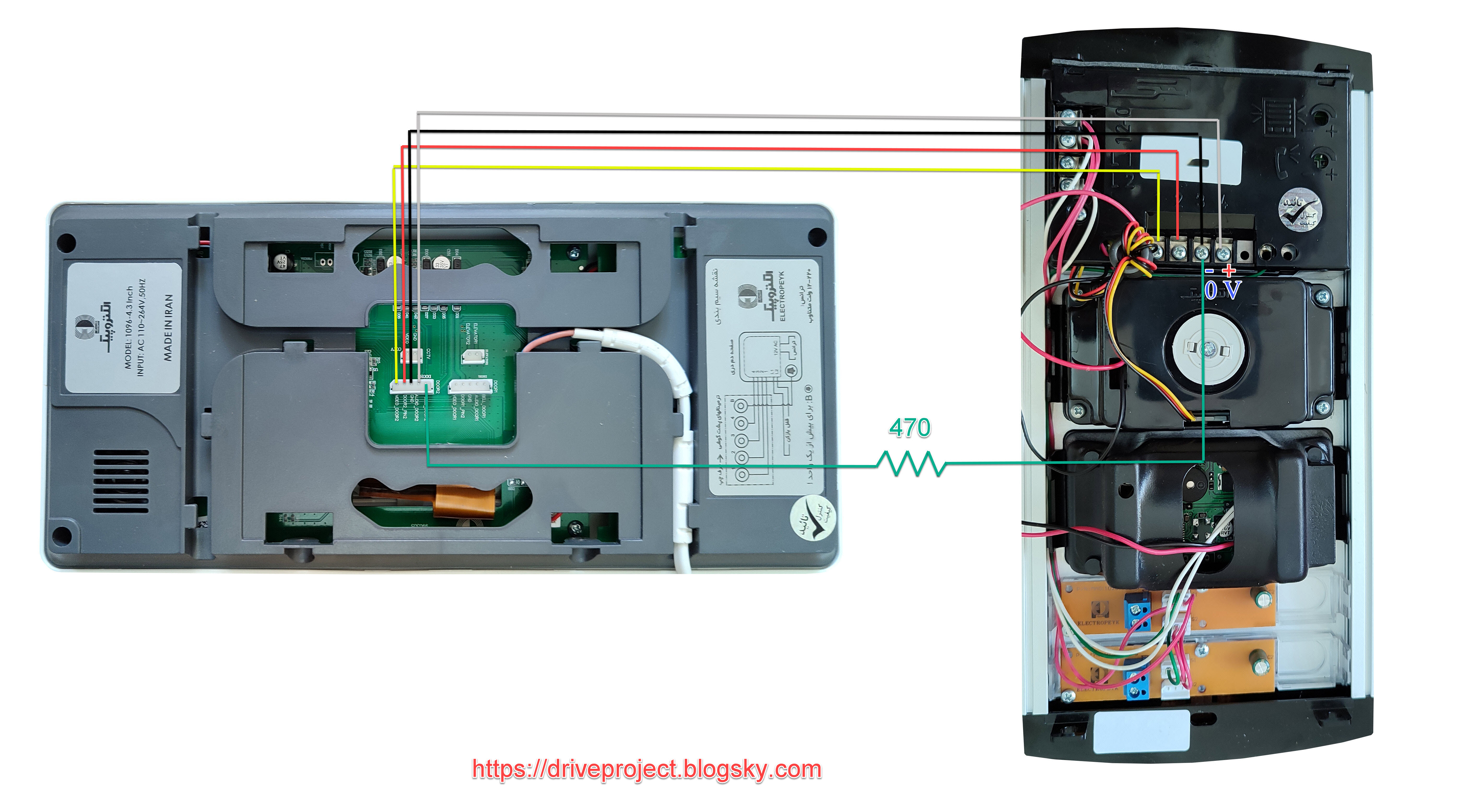
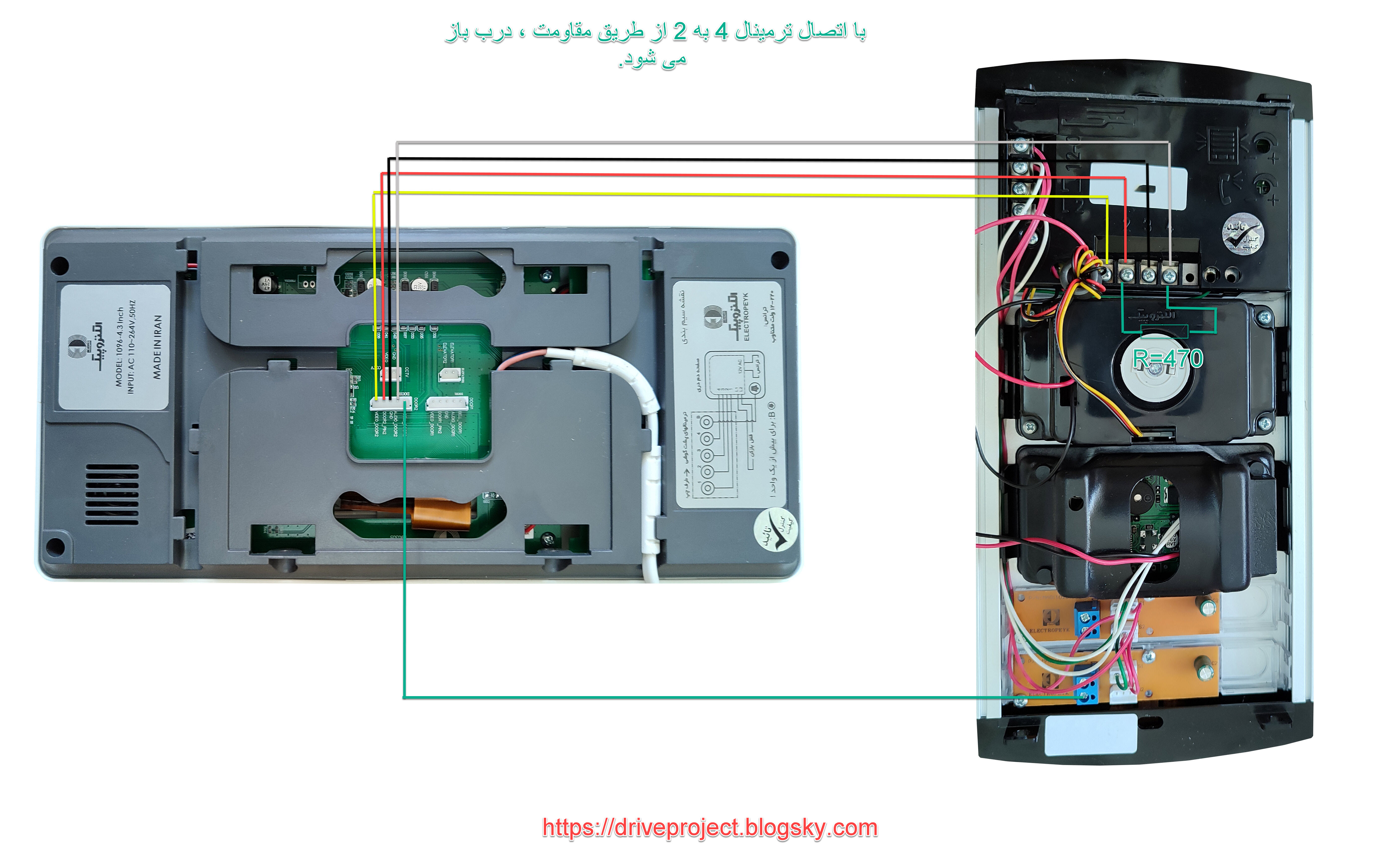
33 : آموزش سیم بندی و رفع عیب آیفون صوتی و آیفون تصویری الکتروپیک
آموزش قبلی :
آموزش اتصال پنل آیفون کوماکس به مانیتور الکتروپیک
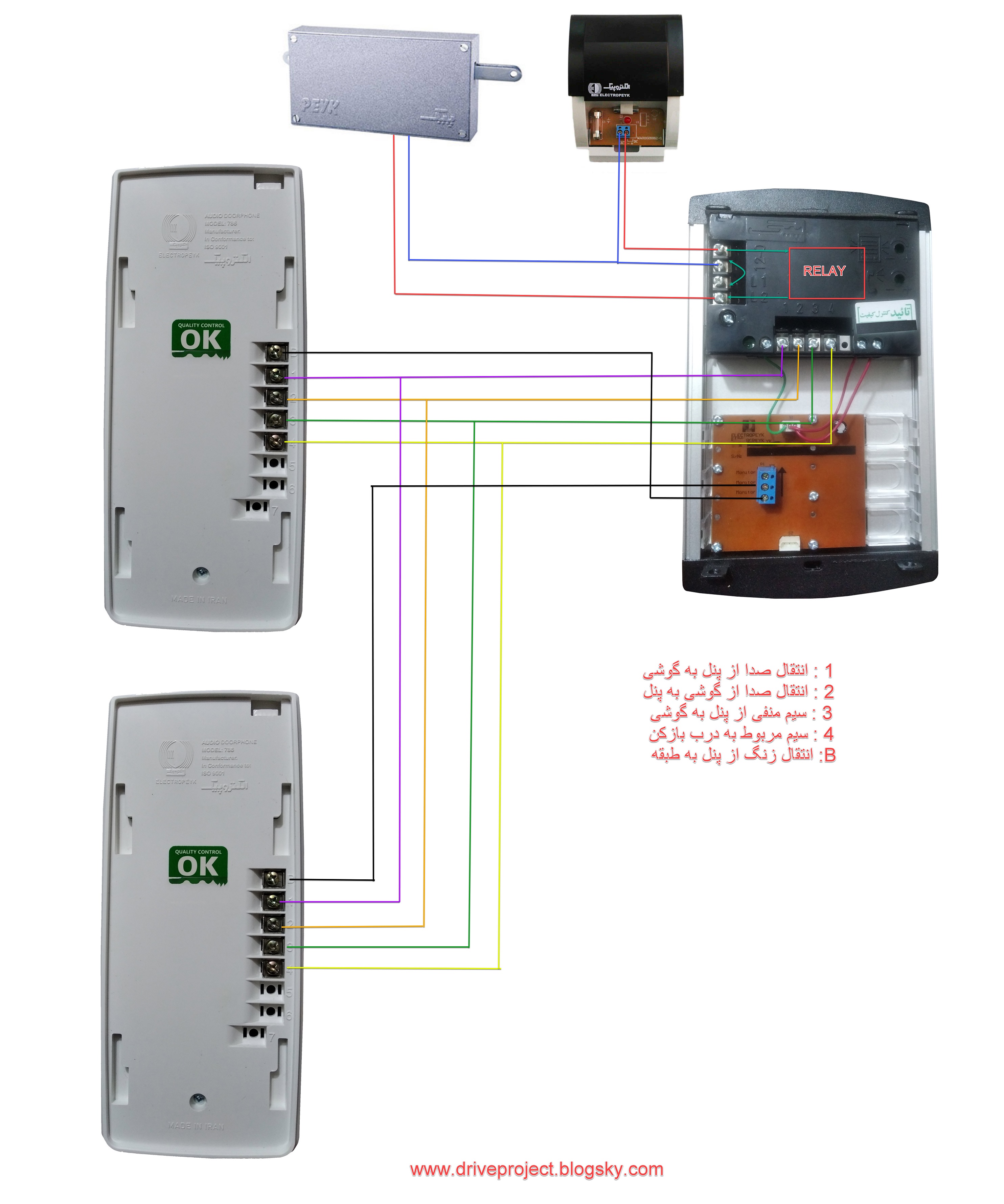
در گوشی ترمینال شماره 1 به 3 متصل هستند

اگر ترمینال 4 با یک مقاومت 1 کیلو اهم به به ترمینال B متصل شود درب باز می شود.

ترمینال 3 به 4 پنل ولتاژ حدود 16 ولت دارد

ترمینال 3 به سیم سبز ولتاژ حدود 8 ولت دارد
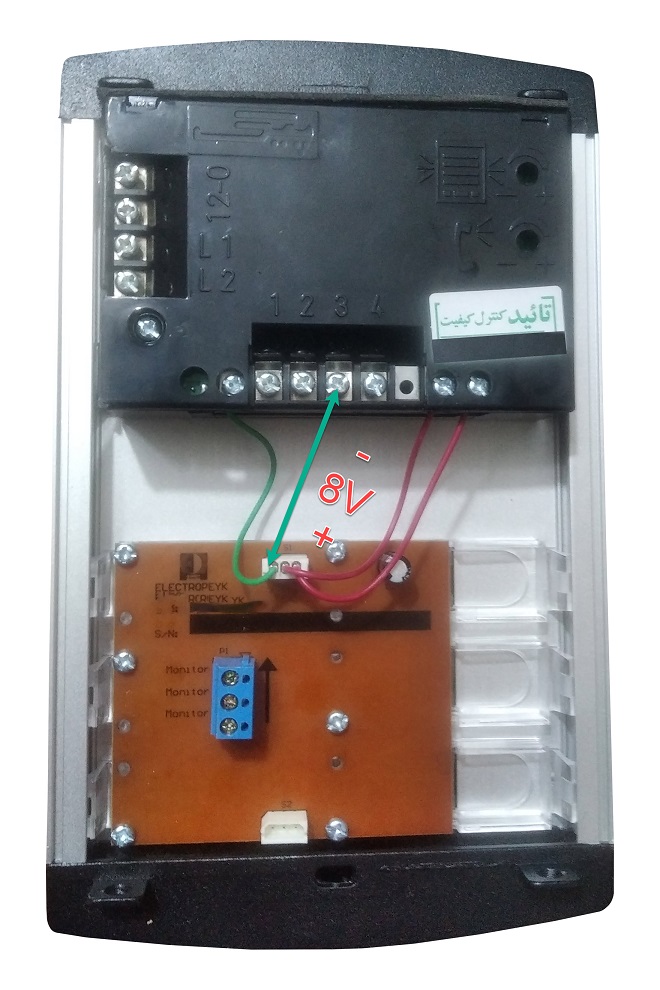
سیم سبز به ترمینال 4 پنل ولتاژ حدود 8 ولت دارد

در صورت زدن شاسی زنگ، یک پالس برای B ارسال می شود
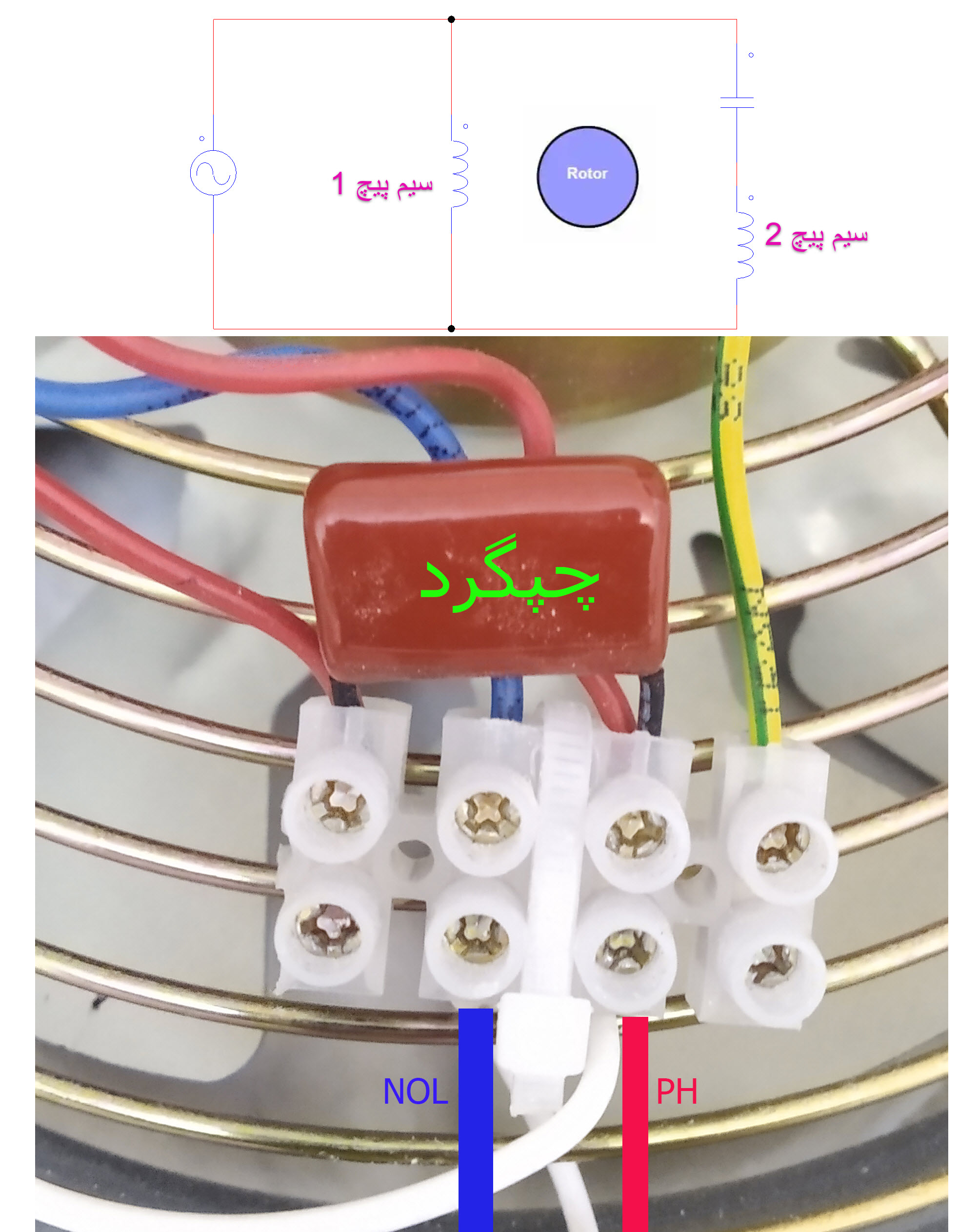
32 : آموزش تغییر جهت دور موتور تکفاز
همانطور که می دانید استاتور در موتور های تکفاز بر خلاف موتور های القایی سه فاز، میدان الکتریکی گردان تولید نمی کنند لذا کارکرد موتور های القایی سه فاز بهتر از نوع تکفاز می باشد.
به موتور های الکتریکی تکفاز موتور های ضربه ای نیز گفته می شود زیرا جهت تولید میدان در آن شمالی _جنوبی بوده و بایستی با ایجاد انحراف در میدان ، این نیروی شمالی_جنوبی را به نیروی تقریبا گردشی تبدیل کرد.
یکی از این راهها نصب خازن می باشد.
نمونه فن الکتریکی :

پلاک فن به همراه مقدار مورد نیاز خازن
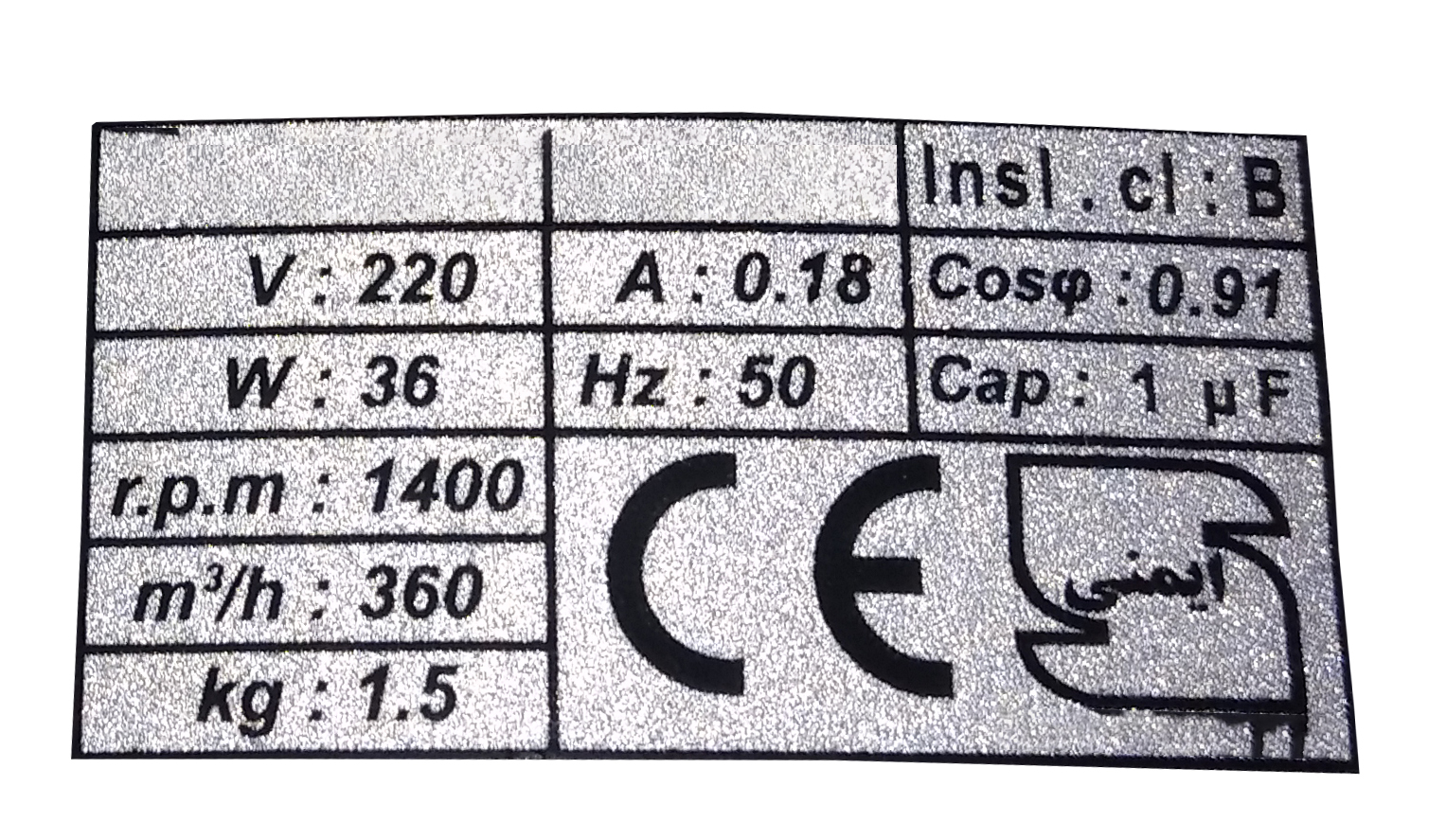
مشاهده می کنید برای یک فن 36 وات از یک خازن 1 میکرو فاراد استفاده شده است.
حال برای فن تکفاز که خازن بصورت دایمی باید در مدار باشد ، برای تغییر دور از مدار زیر باید استفاده نمود :
31 : معرفی تعدادی IC و ترانزیستور و IGBT و ماسفت پر کاربرد بخش دوم
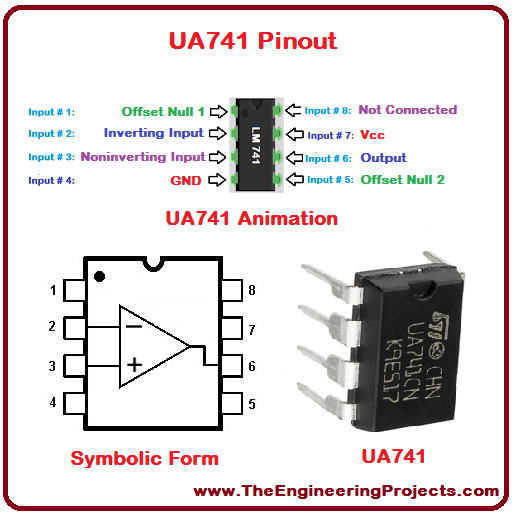
دانلود کاتالوگ ای سی آپ امپ UA741 :
تست ماسفت ( Mosfet ) ﺑﺎ اﺳﺘﻔﺎده از ﻣﻮﻟﺘﯽ ﻣﺘﺮ دیجیتال
در این پست روش صحیح تست یکی از مهمترین و پرکاربردترین قطعات الکترونیکی یعنی تست ماسفت را به شما آموزش خواهیم داد. تست ماسفت به سادگی تست دیگر ترانزیستورها نیست؛ چون کوچکترین تغییری در گیت آن موجب خطا در آزمایش خواهد شد.
توجه داشته باشید که در این آموزش از مالتی متر دیجیتال برای تست ماسفت استفاده شده است.
نکات قبل از شروع تست ماسفت
- در این روش ﮐﻠﯿﻪ ﻣﺮاﺣﻞ ﺑﺎ اﺳﺘﻔﺎده از ﺗﺴﺖ دیود اﻧﺠﺎم ﻣﯽﺷﻮد؛ ﻟﺬا ﺳﻠﮑﺘﻮر مولتی ﻣﺘﺮ را ﺑﺮ روی ﻣﺪ ﺗﺴﺖ دیود ( ﺑﯿﺰر ﺻﻮﺗﯽ ) ﻗﺮار ﺑﺪﻫﯿﺪ.
- دﻗﺖ ﮐﻨﯿﺪ ﺗﻤﺎﻣﯽ ﻣﺮاﺣﻞ ﺑﺎید ﺑﻪ ﺗﺮﺗﯿﺐ اﻧﺠﺎم ﺷﻮد.
- ﻫﻨﮕﺎم ﺗﺴﺖ ﻧﺒﺎید Mosfet ﺑﺎ دﺳﺖ ﺗﻤﺎس ﭘﯿﺪا ﮐﻨﺪ.
- ﻗﺒﻞ از ﺷﺮوع ﺗﺴﺖ ﺑﻮﺳﯿﻠﻪ دیتاﺷﯿﺖ ﭘﺎیه ﻫﺎی ﻣﺎﺳﻔﺖ ﻣﻮرد ﺗﺴﺖ را ﻣﺸﺨﺺ ﮐﻨﯿﺪ و آن را ﺑﺮ روی یک ﮐﺎﻏﺬ ﺗﺮﺳﯿﻢ ﮐﻨﯿﺪ؛ ﺗﺎ زﻣﺎن ﺗﺴﺖ ﺑﺘﻮاﻧﯿﺪ آﻧﻬﺎ را ﺷﻨﺎﺳﺎیی ﮐﻨﯿﺪ.
- اﺑﺘﺪا ﺑﺮای اینکه ﺑﺎر ذﺧﯿﺮه ﺷﺪه در ﻣﺎﺳﻔﺖ ﮐﻪ ﺑﺮ اﺛﺮ دﺳﺖ زدن ﺑﻪ ﭘﺎیه ﻫﺎیش ایجاد ﺷﺪه ﺗﺨﻠﯿﻪ ﺷﻮد ﺑﺎید هر ﺳﻪ ﭘﺎیه ﻣﺎﺳﻔﺖ ﺗﻮﺳﻂ ﻗﺴﻤﺖ ﻓﻠﺰی ﭘﯿﭻ ﮔوشتی دﺳﺘﻪ دار اﺗﺼﺎل ﮐﻮﺗﺎه ﺷﻮد. دﻗﺖ ﮐﻨﯿﺪ ﻣﯿﻠﻪ ﻓﻠﺰی ﭘﯿﭻ ﮔﻮﺷﺘﯽ ﺑﻪ دﺳﺖ یا ﻓﺮش یا هر چیزی که موجب باردار شدن آن می شود اﺻﺎﺑﺖ ﻧﮑﻨﺪ.
- ﺑﻬﺘﺮ اﺳﺖ این ﮐﺎر روی یک ﻣﯿﺰ ﭼﻮﺑﯽ اﻧﺠﺎم ﺷﻮد.
|
مراحل |
P-CHANNEL |
N-CHANNEL |
|
سیم مشکی به گیت متصل شود سیم قرمز به سورس متصل شود |
مولتی متر نباید بوق بزند ( مدار باز ) |
مولتی متر نباید بوق بزند ( مدار باز ) |
|
سیم قرمز به درین متصل شود سیم مشکی به سورس متصل شود |
مولتی متر رنج دیود ها را نشان میدهد ( 250 تا 650 ) |
مولتی متر نباید بوق بزند ( مدار باز ) |
|
سیم مشکی به درین متصل شود سیم قرمز به سورس متصل شود |
مولتی متر نباید بوق بزند ( مدار باز ) |
مولتی متر رنج دیود ها را نشان میدهد ( 250 تا 650 ) |
|
سیم قرمز به گیت متصل شود سیم مشکی به سورس متصل شود |
مولتی متر نباید بوق بزند ( مدار باز ) |
مولتی متر نباید بوق بزند ( مدار باز ) |
کلید واژه راهنمای تصویری نشریه 110

هزینه دانلود کلیدواژه 20000 تومان
برای تهیه کامل کلید واژه با شماره بالا تماس بگیرید
59 شبیه سازی موتور dc و کنترل دور آن توسط کنترلر های P _ PI _ PID
بمنظور شبیه سازی موتور های DC از چند روش می توان اقدام نمودکه از جمله آنها می توان به روش های زیر اقدام نمود :
1 : بلوک آماده نرم افزار سیمولینک متلب
2 : بلوک آماده نرم افزار PSIM
3 : ترسیم بلوک دیاگرام موتور در محیط سیمولینک نرم افزار متلب
4 : کد نویسی بلوک دیاگرامی در محیط M.FILE نرم افزار متلب
در این شبیه سازی ما از روش 3 می خواهیم استفاده کنیم :
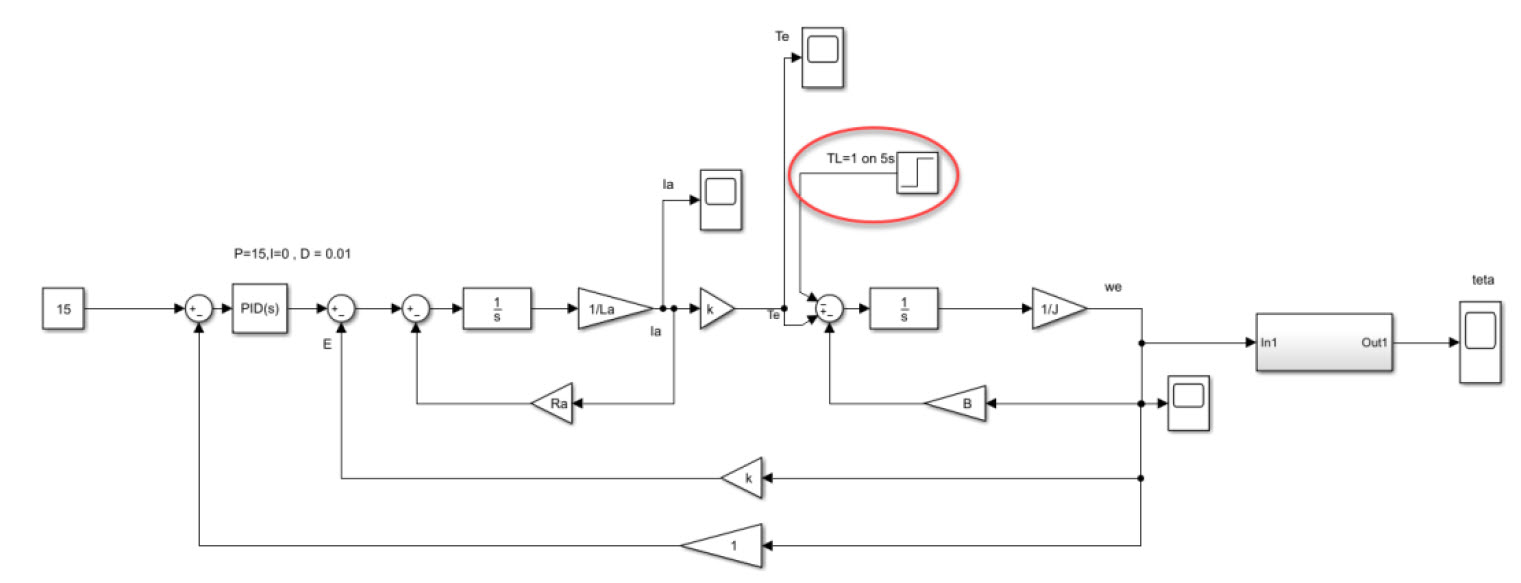
در این مقاله ضمن ارایه فایل های m.FILE به دانشجو، یک فایل ورد آموزشی 70 صفحه ای نیز تحویل خواهد شد.
شبیه سازی با نرم افزار متلب
مبلغ : 350,000 R
فایل آموزشی WORD :
مبلغ : 350,000 R
30 نقشه مداری استفاده از دو کنتور در یک ساختمان
ساختمان 2 طبقه ای را در نظر بگیرید که هر دو واحد توسط یک مجموعه مدیریت می شود.
اداره برق به این ساختمان 2 کنتور اختصاص می دهد.
در صورتیکه یکی از واحد ها مصرف برق چندانی نداشته باشد و واحد دیگر مصرف بیشتری داشته باشد هزینه برق برای واحد پر مصرف تصاعدی می شود.
لذا در این مجموعه ها معمولا برای جلوگیری از تصاعدی شدن این مبلغ می توان 15 روز ابتدایی هر ماه هر دو واحد از یک کنتور برق رسانی شوند و 15 روز دوم از کنتور دیگر
این کار معمولا بصورت دستی و توسط کلید انجام می شود

حال در صورتیکه بخواهیم این کار بصورت اتوماتیک انجام شود می توان از مدار زیر استفاده نمود
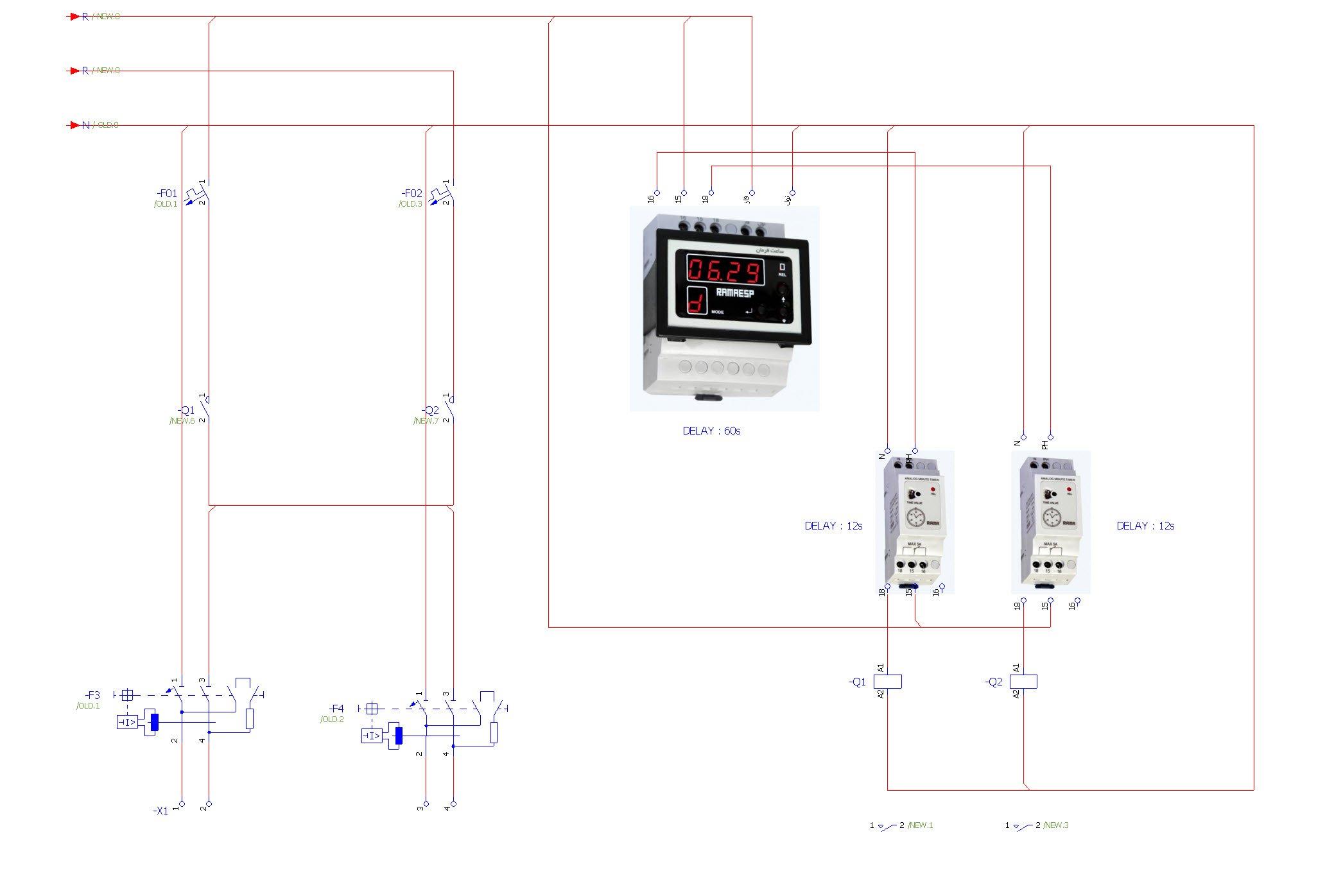
تذکر :
توصیه می شود این کار برای ساختمان هایی انجام شود که هر دو فاز مجموعه یکسان باشد. ولی این طرح برای ساختمان های با 2 فاز متفاوت نیز جوابگو هست ولی توصیه نمی شود چون در صورت خطا در سیم کشی می تواند منجر به اتصالی شود.
29 : آموزش تعمیر پنل های سقفی
نمونه پنل سقفی :

در صورت سوختن ریسه این پنل ، الزاما بایستی ریسه و درایور تعویض گردند چون پیدا کردن نمونه مشابه کار سختی است
ریسه مورد استفاده در پنل 18 وات اسمی پنل ها 60 سانتی متر بوده که باید با نمونه مشابه تعویض گردد
نمونه ریسه موجود در بازار :
این نوع ریسه با نمونه های 12 ولت معمولی تفاتوت اساسی دارد در نمونه های 12 ولتی از مقاومت های کاهنده جریان استفاده می شود :
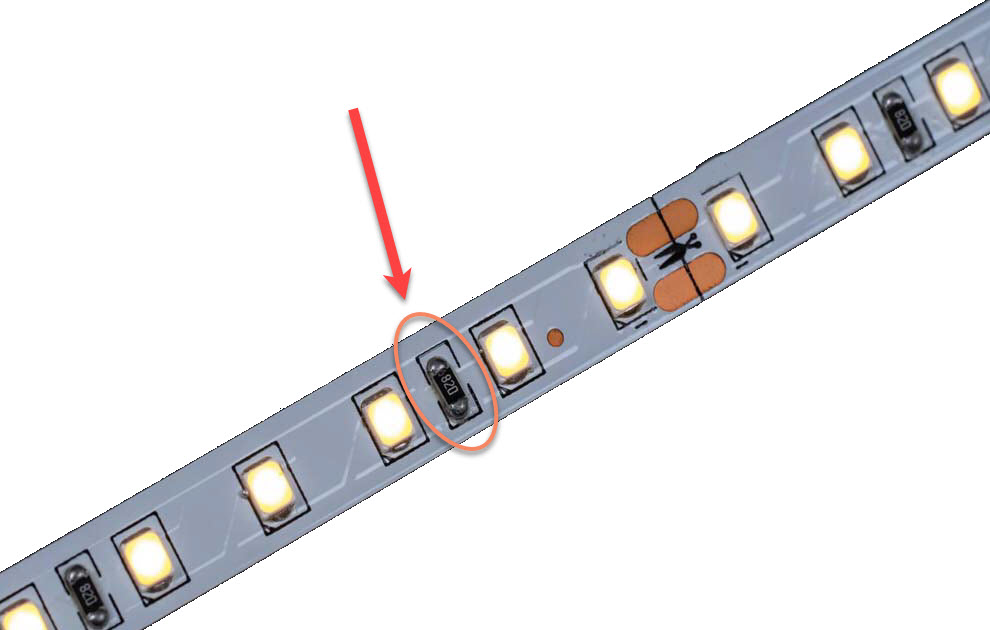
ولی در نمونه ریسه های جریانی از مقاومت خبری نیست
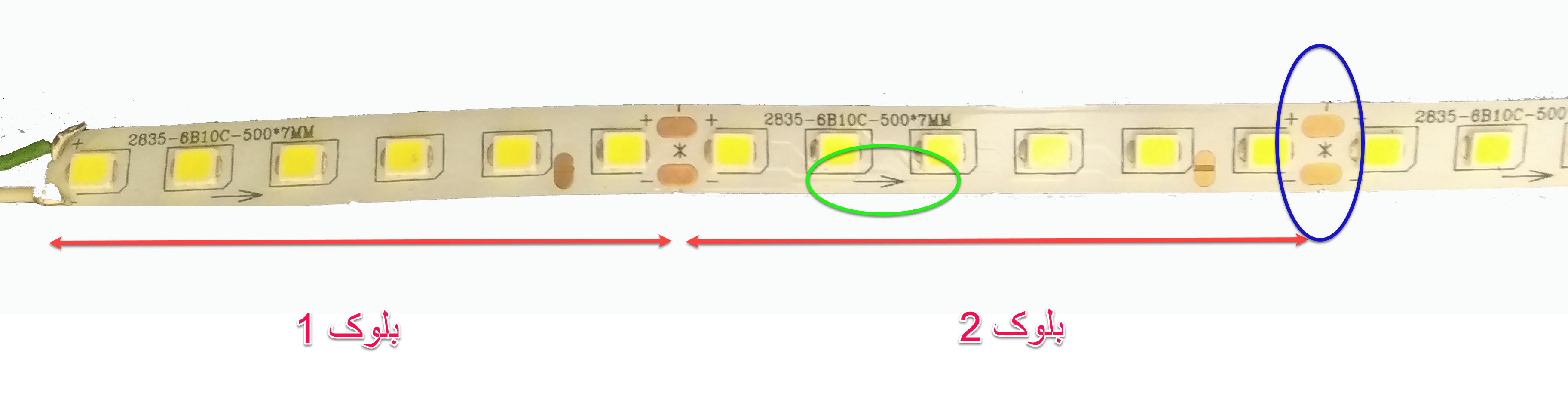
در شکل زیر خط منفی ( خط سبز رنگ ) از ابتدا تا انتهای مسیر عبور داده شده بدون اینکه اتصالی با هر یک از بلوک smd ها داشته باشد
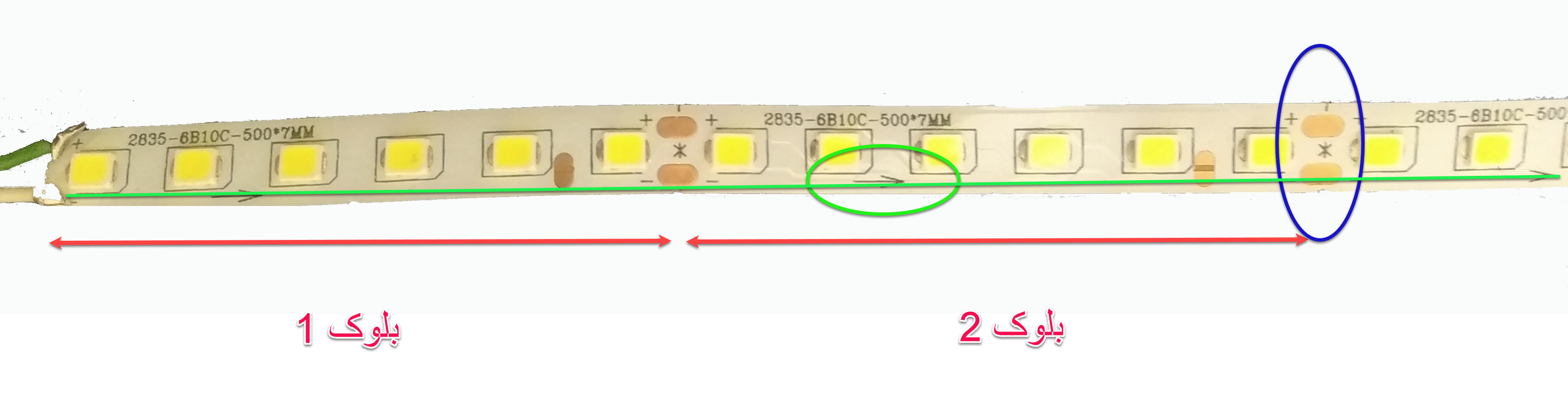
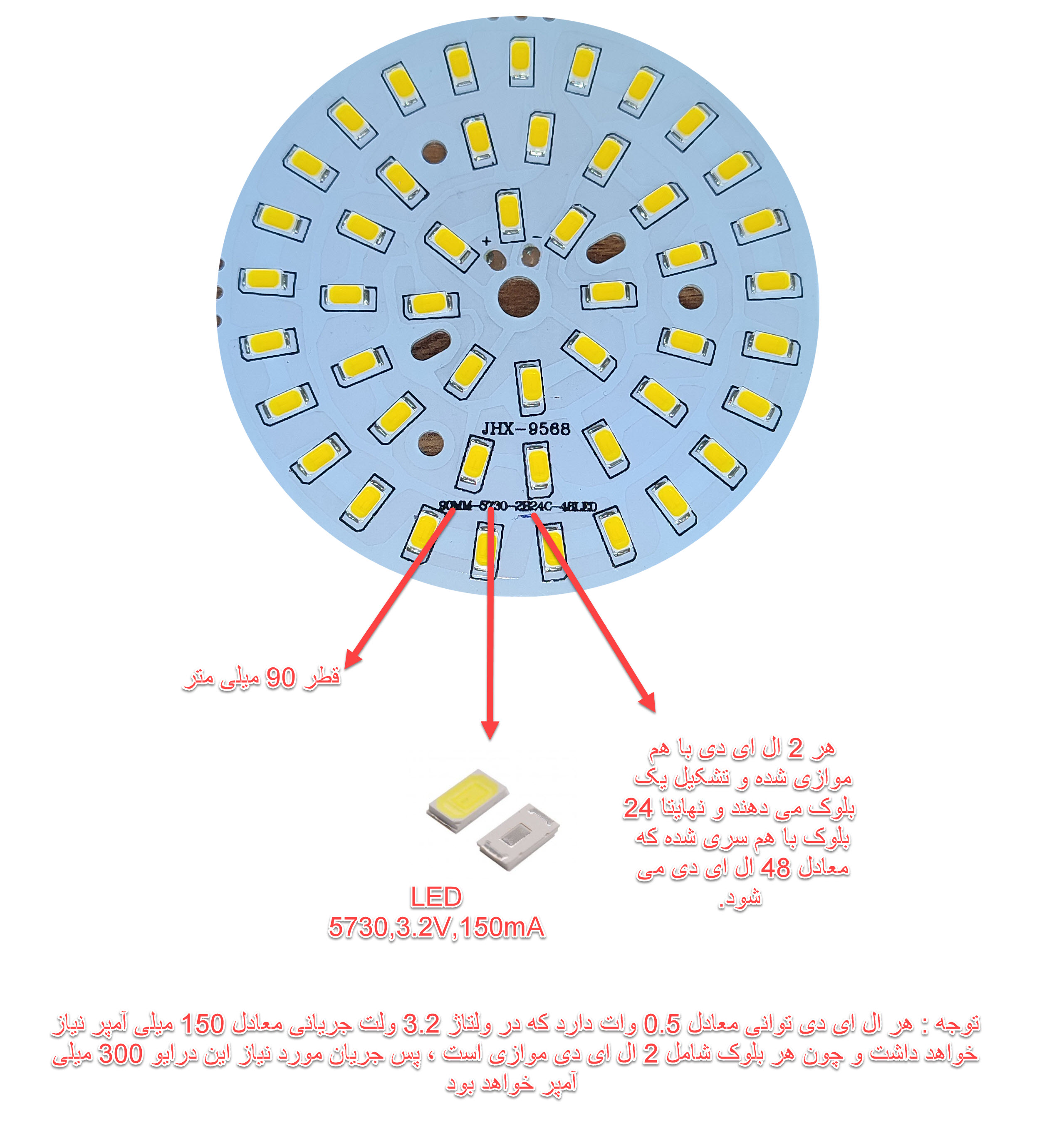
نقشه سیم کشی داخلی smd ها را در شکل زیر می توان دید :
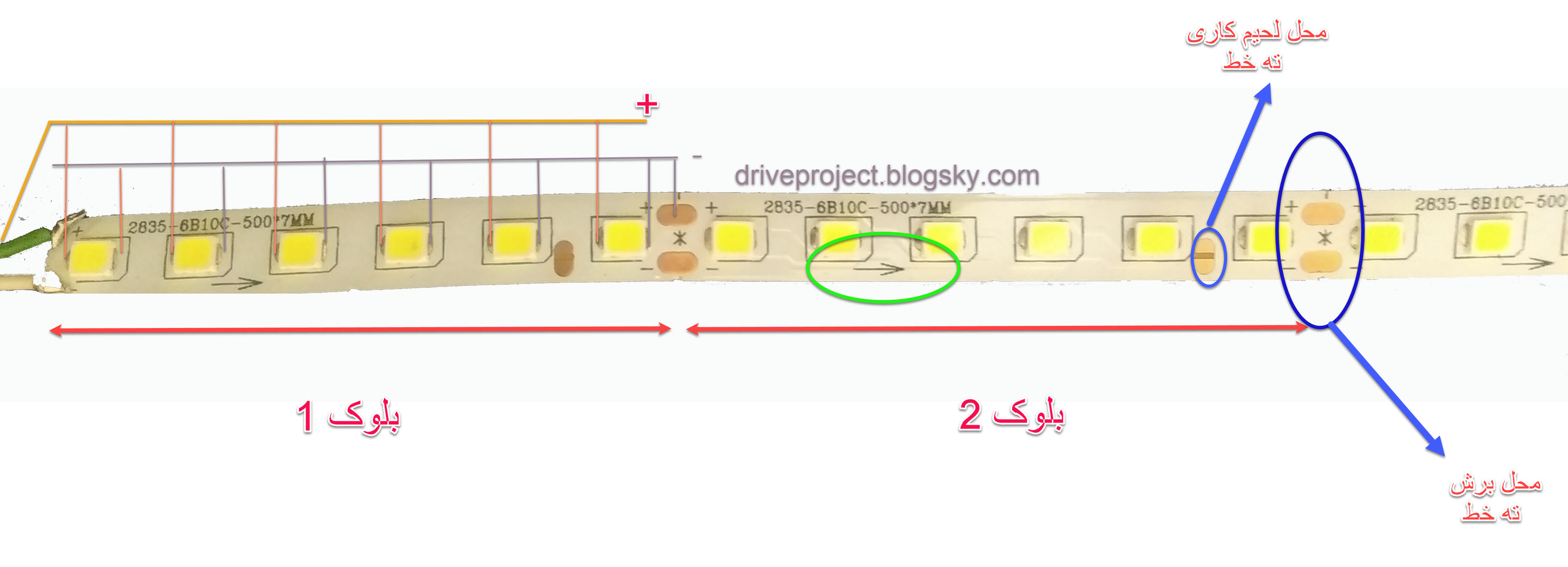
با ایجاد ولتاژ حدود 3 ولت بین + های ابتدایی هر بلوک پشت سر هم ، آن بلوک روشن می گردد.
حال هر بلوک با هم سری شده است.
پس بطور مثال برای روشن کردن 2 بلوک نیاز به ولتاژ تقریبی 6 ولت هستیم فقط باید توجه داشته باشید سر + و - انتهای کار را باید به هم متصل کنیم تا بلوک ها روشن شود.
هر بلوک 5 سانتی متر می باشد . برای ایجاد 60 سانتی متر ما نیازمند 12 بلوک خواهیم بود و ولتاژ مناسب برای 12 بلوک برابر خواهد بود با :
3V*12=36V
پس ما به درایورجریان ثابت ولتاژ متغیر با ولتاژ تقریبی 36 ولت نیاز داریم.
درایور 10 وات می تواند برای این ریسه مناسب باشد . اگر وات درایور را بالا ببریم احتمال سوختن ریسه وجود دارد.
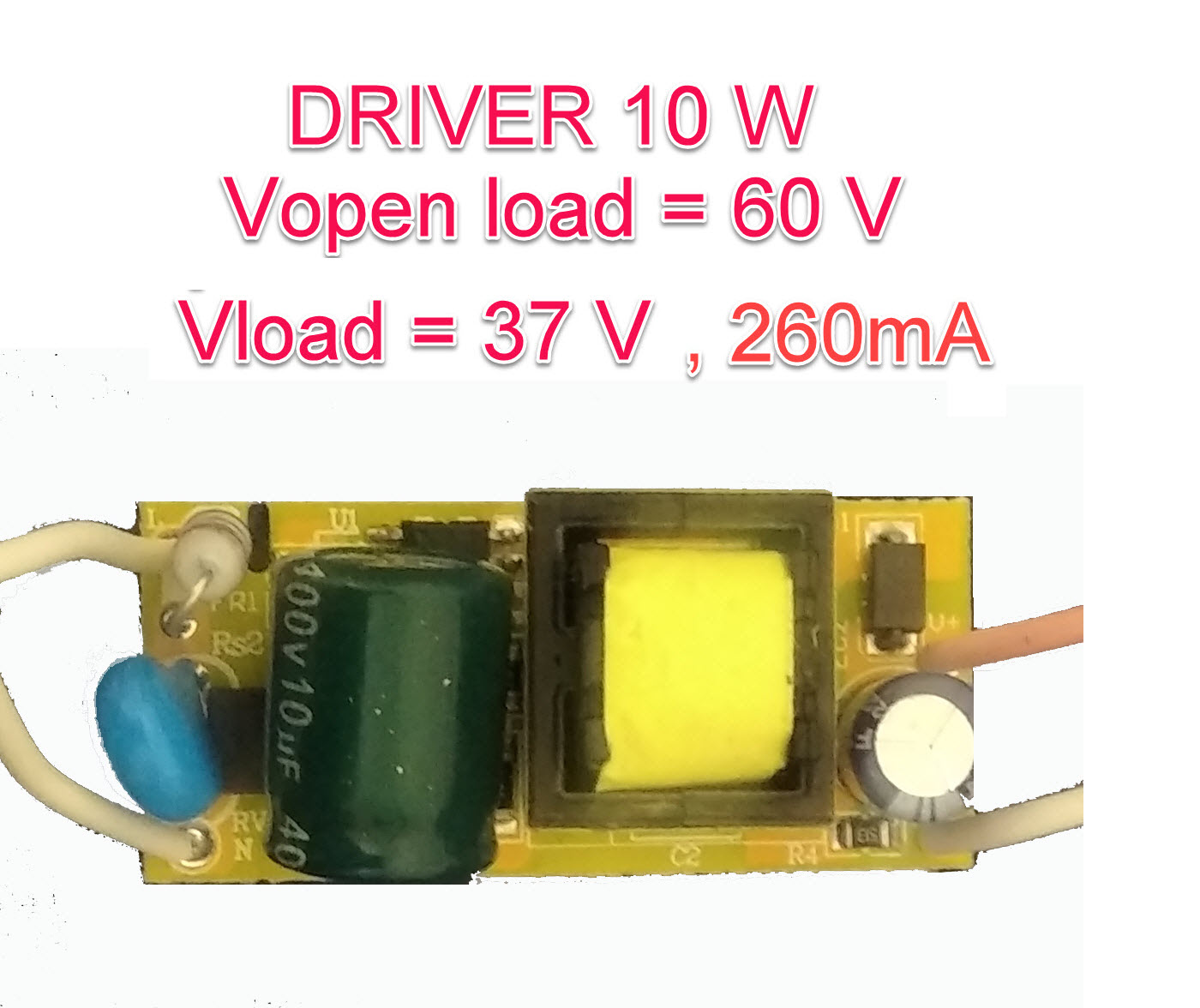
جریان تولیدی درایور 10 وات 260 میلی آمپر می باشد. چون بلوک ها سری بسته شده اند، پس از هربلوک 260 میلی آمپر عبور خواهد کرد .
با توجه به اینکه هر بلوک 6 smd دارد پس از هر smd جریان 43 میلی آمپر عبور خواهد کرد و توان هر smd برابر خواهد بود با :
0.43A*3V=0.125W
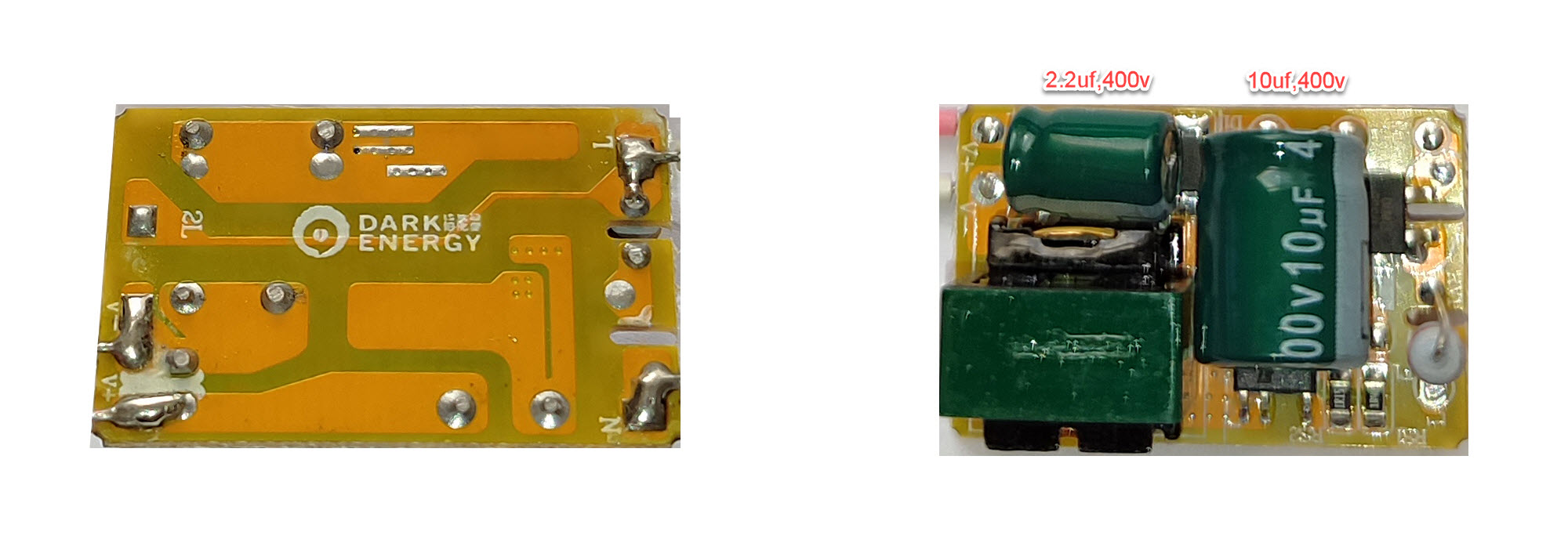
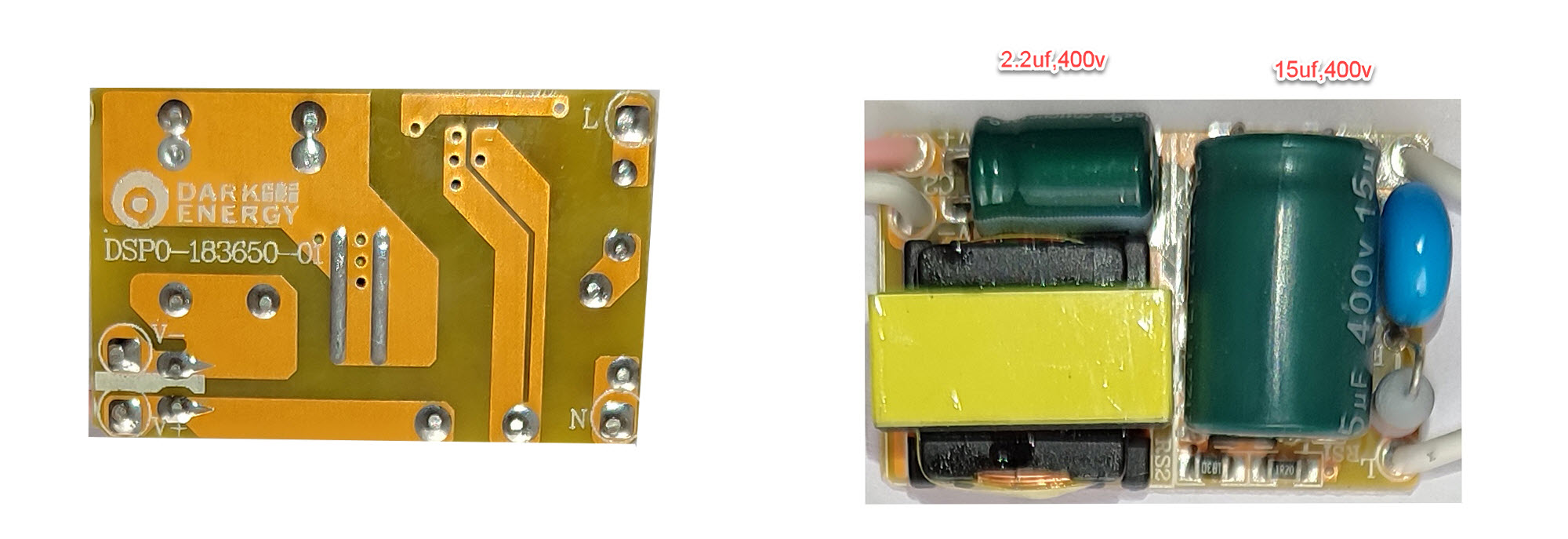
در شکل زیر دو نمونه درایو جهت ریسه خطی 300 میلی آمپر مشاهده می کنید
درایو 8025 که در پشت آن این عبارت درج نشده و خازن ورودی آن 10 میکرو فاراد است برای یک ریسه 1 متری مناسب می باشد
درایو 1836 که در پشت آن این عبارت درج شده و خازن ورودی آن 15 میکرو فاراد است برای یک ریسه 2 متری مناسب می باشد
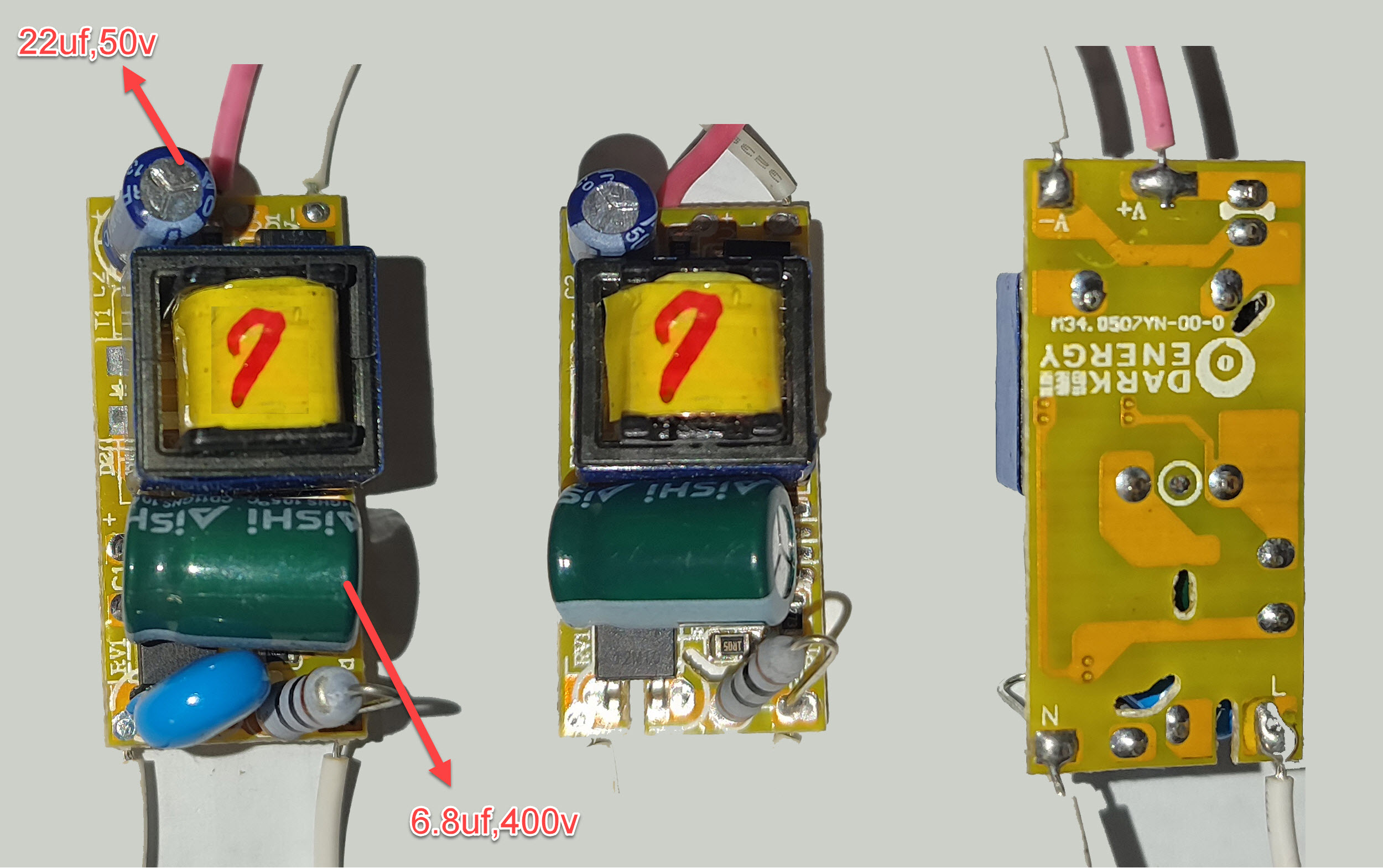
درایو 7 وات و smd panel مربوطه :
خازن ورودی درایو : 6.8 میکرفاراد و 400 ولت
خازن خروجی درایو : 22 میکرفاراد و 50 ولت

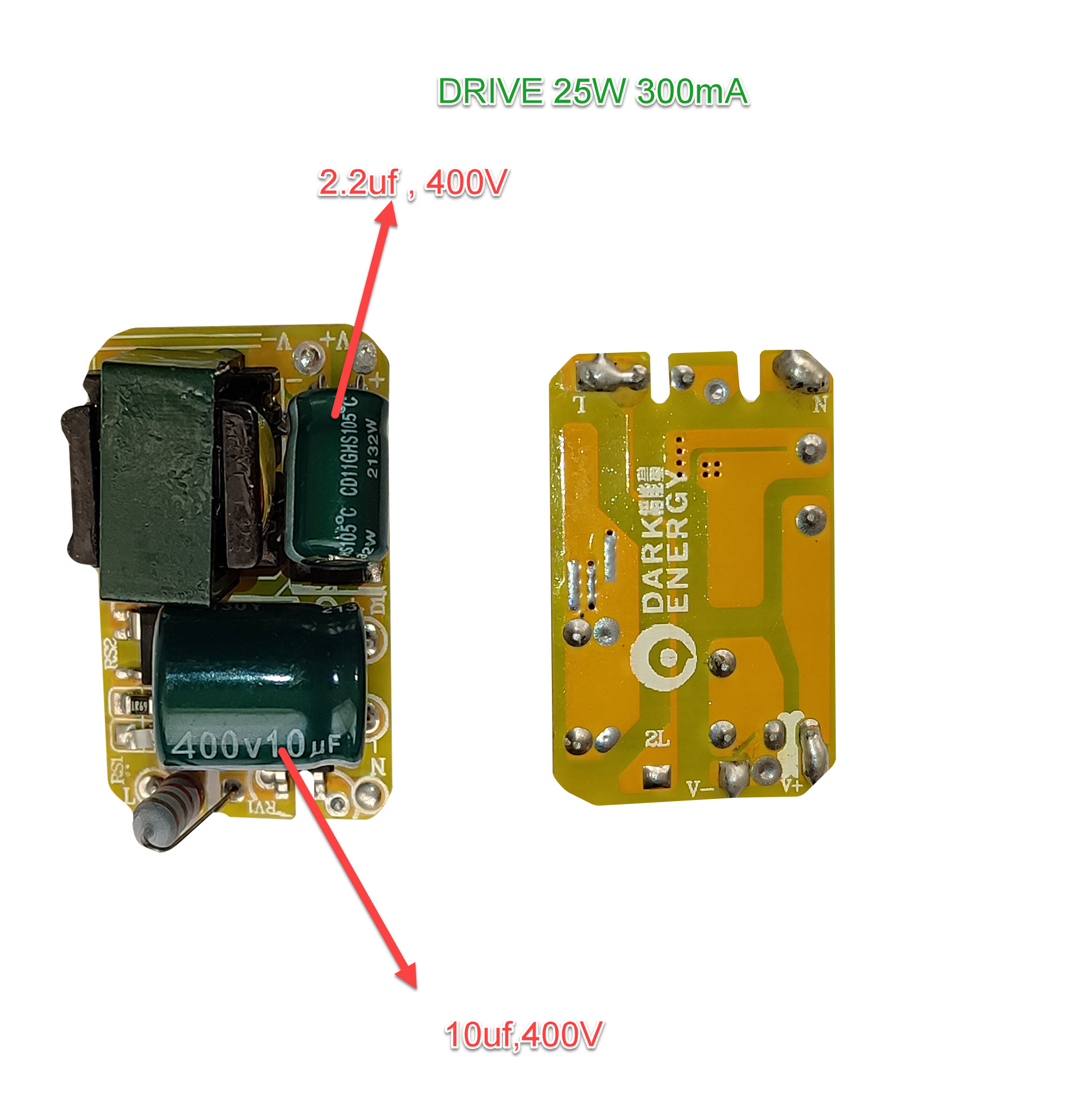
درایو 25 وات ( درایو 8025 ) و smd panel مربوطه ( یاداوری جهت 1 متر ریسه بالا نیز همین درایو مورد استفاده قرار می گرفت ):
خازن ورودی درایو : 10 میکرفاراد و 400 ولت
خازن خروجی درایو : 2.2 میکرفاراد و 400 ولت
نمونه تعمیر شده

در این ریسه ها داریم :
طول ریسه درایو
40 سانتی متر 4 الی 7 وات
50 سانتی متر الی 80 سانتی متر 8 الی 12 وات
1متر الی 2.5 متر 12 الی 20 وات
درایور مورد استفاده در هالوژن های پاور 4 تایی استفاده می شود :
V NO LOAD : 16 V
VOUT =12V , I OUT = 230 mA

ویژگی های درایو های جریان ثابت
درایو 3 وات :
درایو 5 وات :
ولتاژ بی باری :18 الی 22 ولت
ولتاژ کار : 15.3 ولت
جریان بارداری :280 میلی آمپر
درایو 7 وات :
درایو 10 وات 12 ولت :
ولتاژ بی باری :13.4 ولت
ولتاژ کار : 9 ولت
جریان بارداری :940 میلی آمپردرایو 10 وات 30 ولت :
ولتاژ بی باری :؟ ولت
ولتاژ کار : 17.6 ولت
جریان بارداری :300 میلی آمپر
درایو 20 وات :
ولتاژ بی باری :؟ ولت
ولتاژ کار : 31 ولت
جریان بارداری :650 میلی آمپر
درایو 30 وات :
ولتاژ بی باری :47 ولت
ولتاژ کار : 30.5 ولت
جریان بارداری :940 میلی آمپر
به لحاظ کیفیت نور دهی پنل ها لازمست مشخصات آنها با یک معیاری مقایسه گردد لذا اطلاعات چند برند مشهور بصورت زیر می باشد :
پنل گرد توکار 60*60 سانتی متر 80 وات با شار نوری 6400 لومن
پنل گرد روکار 22*22 سانتی متر 42 وات با شار نوری 3150 لومن
پنل گرد روکار 219*19 سانتی متر 22 وات با شار نوری 1540 لومن
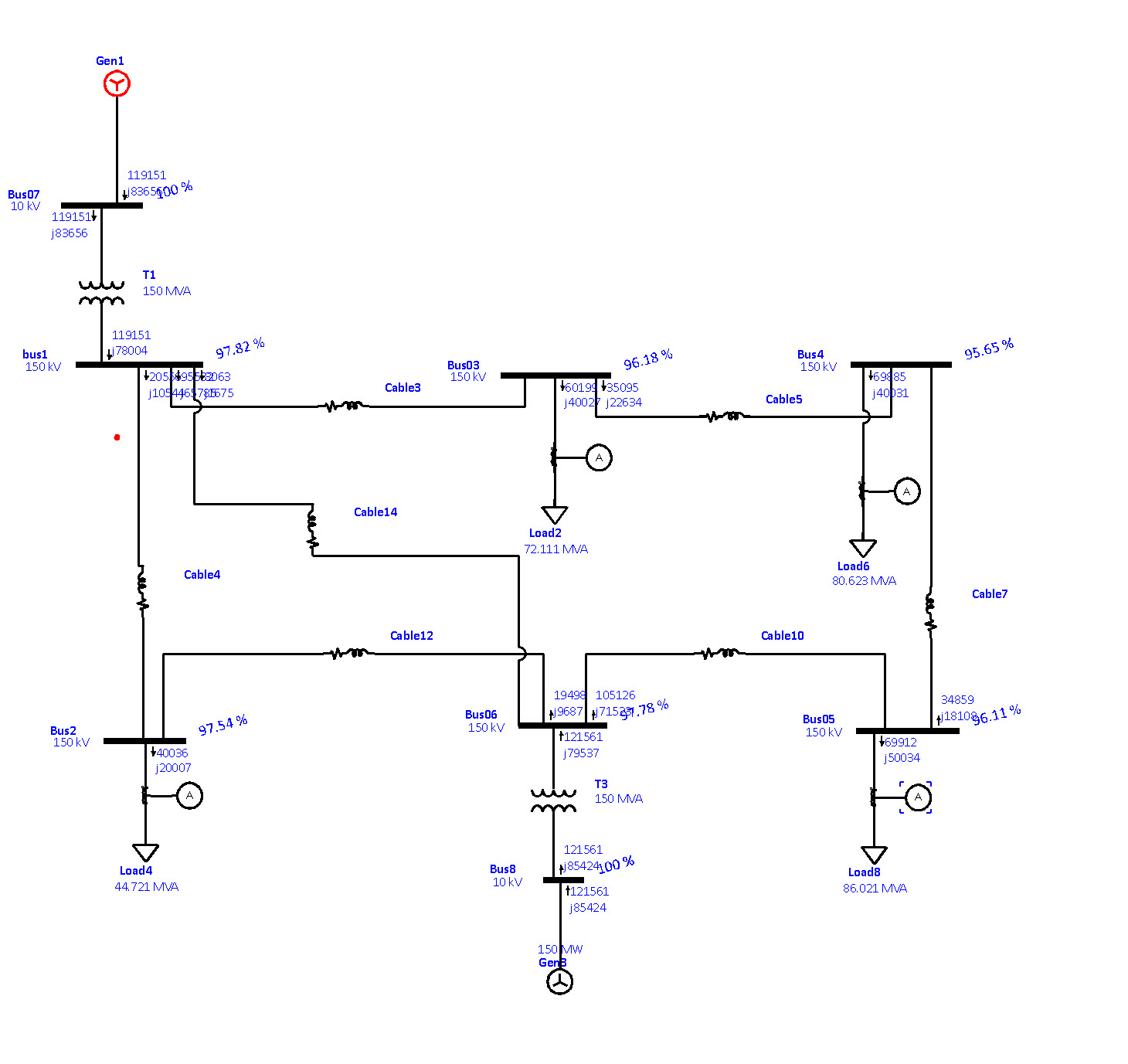
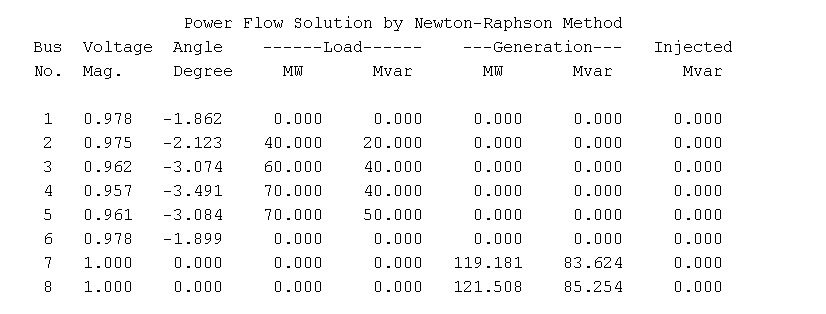
58 شبیه سازی و محاسبات پخش بار شبکه 8 باسه طبق استاندارد IEEE در نرم افزار ETAP
شبکه تحت مطالعه در این پروژه شبکه 8 باسه طبق استاندارد IEEE می باشد :

در این پروژه محاسبات پخش بار با نرم افزار ETAP انجام می شود و محاسبات با نرم افزار MATLAB نیز مقایسه می گردد که نتایج تقریبا مشابهی نیز بدست می آید.
نتیجه شبیه سازی در نرم افزار ETAP :
نتیجه شبیه سازی در نرم افزار MATLAB :

شبیه سازی با نرم افزار متلب و ETAP
مبلغ : 600,000 R
فایل آموزشی PDF :
مبلغ : 350,000 R
28 : آموزش نمونه IC SWITCHING در منبع ولتاژ 24 ولت
در منابع ولتاژ سوییچینگ از IC SWITCHING های مختلفی استفاده می شود که در زیر می توانید تعدادی از این IC ها را مشاهده و دفترچه راهنمای مربوطه را دانلود نمایید:
آی سی سوییچینگ uc3843

این IC در منبع ولتاژ 24 ولت مورد استفاده قرار گرفته است