شبیه سازی های درایو های الکتریکی
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نماییدشبیه سازی های درایو های الکتریکی
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نمایید59 شبیه سازی موتور dc و کنترل دور آن توسط کنترلر های P _ PI _ PID
بمنظور شبیه سازی موتور های DC از چند روش می توان اقدام نمودکه از جمله آنها می توان به روش های زیر اقدام نمود :
1 : بلوک آماده نرم افزار سیمولینک متلب
2 : بلوک آماده نرم افزار PSIM
3 : ترسیم بلوک دیاگرام موتور در محیط سیمولینک نرم افزار متلب
4 : کد نویسی بلوک دیاگرامی در محیط M.FILE نرم افزار متلب
در این شبیه سازی ما از روش 3 می خواهیم استفاده کنیم :
در این مقاله ضمن ارایه فایل های m.FILE به دانشجو، یک فایل ورد آموزشی 70 صفحه ای نیز تحویل خواهد شد.


شبیه سازی با نرم افزار متلب
مبلغ : 350,000 R
فایل آموزشی WORD :
مبلغ : 350,000 R
51 ترسیم میدان های الکتریکی یک دو قطبی الکتریکی در نرم افزار MATLAB
همانگونه که میدانید یک دو قطبی الکتریکی به مجموعه دو بار نقطه ای مساوی و مختلف العلامت گفته می شود که فاصله آنها از هم نسبت به فاصله شان از نقطه P که مقدار میدان های الکتریکی و پتانسیل آن مورد نظر ماست کم می باشد .

خطوط شار برای میدان های الکتریکی و نیز خطوط هم پتانسیل طبق شکل زیر خواهد بود.

برای ترسیم میدان های الکتریکی در نرم افزار متلب لازم است معادله این خطوط را داشته باشیم لذا در ابتدا از معادلات ولتاژ استفاده نموده و پس از گرادیان گیری از این معادلات به خطوط میدان خواهیم رسید .
این معادلات در مختصات کروی محاسبه شده و ترسیم خواهند شد.
در ادامه برنامه معادلات میدان های الکتریکی در مختصات کروی را به دکارتی تبدیل نموده و نهایتا شکل ها ترسیم خواهند شد.



شبیه سازی با نرم افزار MATLAB
به همراه یک فایل PDF شامل 6 صفحه
مبلغ : 350,000 R
18 آموزش تحلیل شبکه های از دو سو تغذیه و کد نویسی در متلب
در شبکه های از دو سو تغذیه بمنظور تحلیل مدار ( افت ولتاژ هر خط - ولتاژ هر باس و جریان هر مسیر ) می توان با استفاده از قانون kvl استفاده نمود در شکل زیر نمونه ای از شبکه از دو سو تغذیه را مشاهده می کنید.
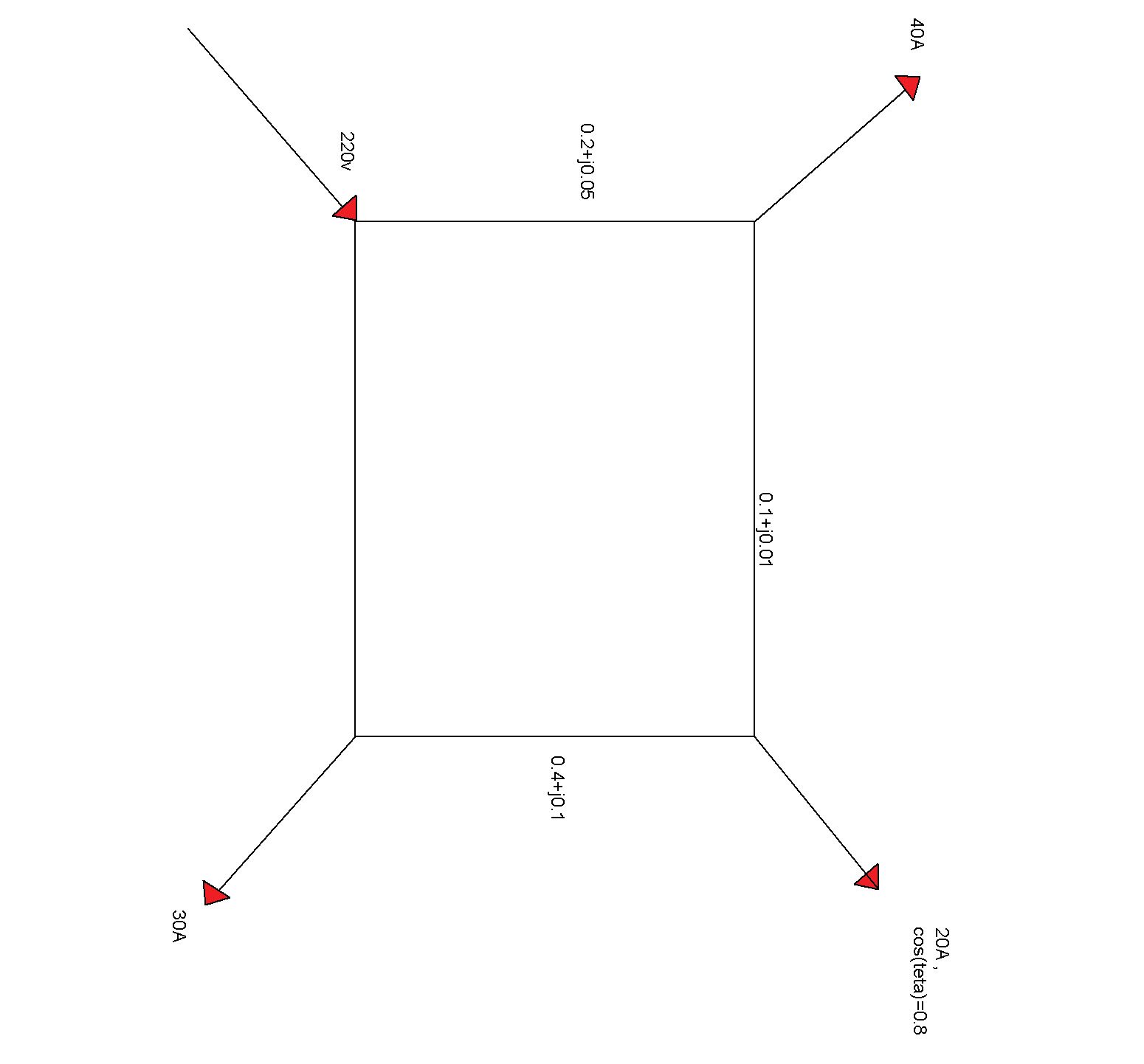
بمنظور تحلیل ای مدار کافی است ابتدا مدار را از نقطه ابتدایی باز کنیم و جریان هر خط را بر روی آن با استفاده از قانون kcl مشخص کنیم:

حال با زدن یک kvl ساده می توان مدار را تحلیل کرد . در این بخش از آموزش با استفاده از کد نویسی متلب می خواهیم مدار را تحلیل کنیم :
49 شبیه سازی اینورتر تکفاز کنترل کننده جریان توسط کنترل کننده PID
اینورتر های تکفاز معمولا توسط H-BRIDGE که شامل 4 سوییچ می باشد ، کنترل می شوند روش مرسوم در مورد کنترل گیت های این سوییچ ها روش PWM است که در آن یک موج سینوسی با یک موج دندانه اره ای با فرکانس حداقل 10 برابر فرکانس شکل موج اصلی مقایسه می شود و خروجی مقایسه کننده به عنوان کنترل کننده گیت می باشد. در این شبیه سازی ما جهت کنترل گیت ها از کنترلر PID به همراه مقایسه کننده باند هیسترزیس بهره می گیریم که شکل مدار بفرم زیر می باشد :

نتیجه شبیه سازی :

شبیه سازی با نرم افزار matlab
25000 ت
40 شبیه سازی موتور DC در فضای حالت بهمراه کنترلر سرعت PID
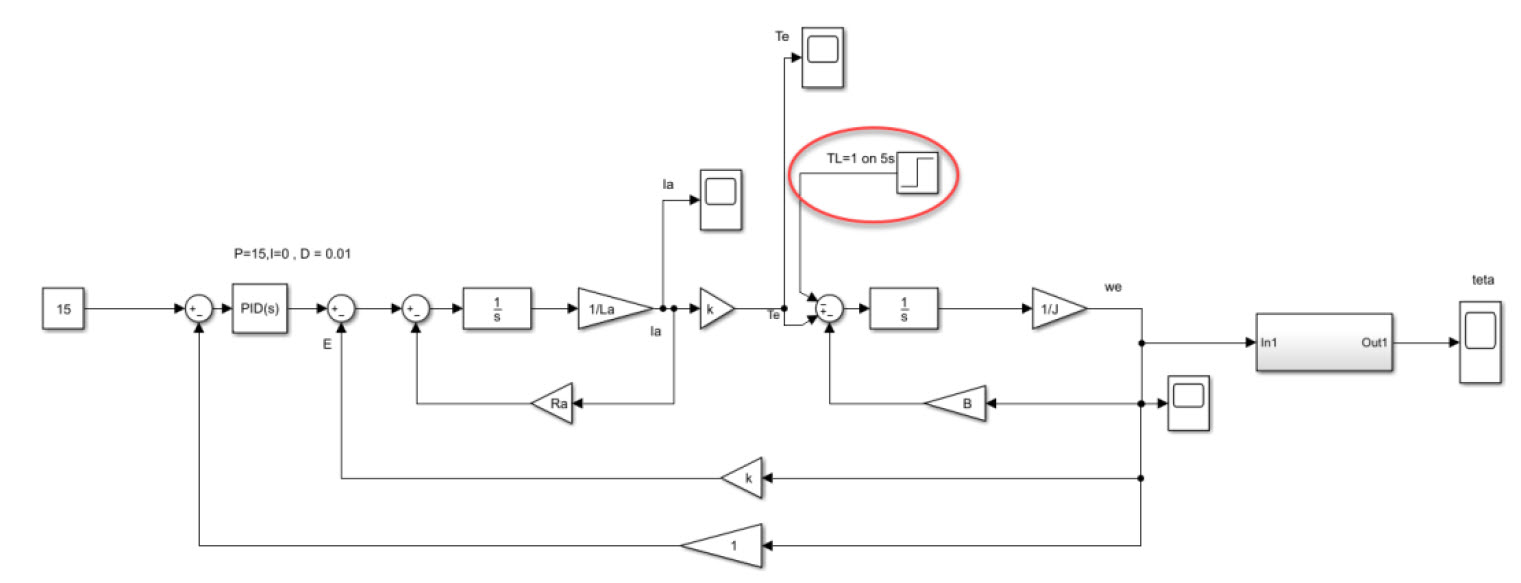
هر موتور DC دارای چندین پارامتر تاثیر گذار در شبیه سازی می باشد . پارامتر هایی نظیر مقاومت القایی روتور ، مقاومت روتور ، ممان اینرسی و ثابت محرکه و ... که با داشتن این دسته از اطلاعات و قرار دادن این مقادیر در بلوک دیاگرام های محیط سیمولینک متلب ، خروجی شبیه سازی را مشاهده نمود.
همانگونه که می دانید معمولا ورودی یک موتور DC از جنس ولتاژ بوده و خروجی آن می تواند زاویه و یا سرعت باشد.
در این شبیه سازی خروجی موتور DC را سرعت قرار داده و می خواهیم سرعت موتور توسط کنترلر PID و اعمال ضرایب مناسب برای این کنترلر ، مقدار واقعی سرعت موتور را به مقدار مطلوب آن نزدیک کنیم.
همراه این فایل شبیه سازی ، فایل آموزشی نحوه استفاده از بلوک های سیمولینک نیز قرار داده شده است.
بلوک دیاگرام کنترلی :

پاسخ سرعت :

پاسخ موقعیت :

شبیه سازی با نرم افزار متلب MATLAB
هزینه شبیه سازی 25000 ت
هزینه فایل PDF در 8 صفحه 15000 ت
38 شبیه سازی شبکه شعاعی 33 باسه
در شبکه های انتقال قدرت که طول مسیر بالاست و مقدار مقاومت اهمی چندین برابر راکتانس سلفی است ، معمولا شبیه سازی سیستم قدرت در نرم افزار متلب توسط روش تکراری نیوتون رافسون و یا گوس سایدل انجام پذیر است ولی در شبکه های سیستم توزیع با توجه به اینکه فاصله مصرف کننده ها کم است ، مقدار مقاومت اهمی و راکتانس سلفی تفاوت چندانی با هم نداشته لذا در اینگونه سیستم ها از روش پیشرو یا پسرو استفاده می شود.
در شبکه های شعاعی سیستم 33 باسه و 69 باسه طبق استاندارد IEEE لحاظ می شود که اطلاعات ورودی این شبکه ها از مسیر زیر قابل دانلود می باشد.
در این شبیه سازی شبکه 33 باسه مورد مطالعه قرار می گیرد و ولتاژ هر باس به همراه جریان ورودی به هر باس استخراج می گردد.
دیاگرام 33 باسه:

پاسخ :

شبیه سازی با نرم افزار متلب MATLAB
هزینه شبیه سازی 55000 ت
24 کنترل دور ماشین dc توسط کنترل کننده فازی
بمنظور کنترل سرعت ماشین dc لازم است تا ولتاژ یا جریان آرمیچر که رابطه مستقیمی با سرعت دارند ، کنترل شوند.
بدین منظور در این روش از کنترل کننده فازی در محیط نرم افزار متلب شبیه سازی را انجام داده ایم :

شبیه سازی توسط نرم افزار matlab
هزینه شبیه سازی: 300,000R
12 شبیه سازی موتور PMSM در محیط سیمولینک متلب :
pm motors
سیمپیچی استاتور در موتورهای سنکرون آهن ربای دائم همانند سیم پیچی موتورهای القایی و موتورهای BLDC است. این سیم پیچی می تواند به صورت توزیع شده و یا متمرکز باشد. روتور این موتورها همانند موتور BLDC سیمپیچ نداشته و بسته به نحوه قرارگیری آهنربا در رتور می تواند دارای ساختارهای مختلفی شامل آهن ربای سطحی، آهن ربای داخلی و آهن ربای دفن شده باشد. در شکل زیر استاتوری به سیم پیچ توزیع شده و روتوری با آهن ربای سطحی نشان داده شده است

در این شبیه سازی موتور PMSM توسط بلوک های واقع در نرم افزار متلب نظیر تبدیل 3 محوری به 2 محوری ، و بالعکس شبیه سازی شده است که نتایج آن طبق شکل می باشد :

شبیه سازی با نرم افزار متلب
مبلغ : 400,000R
10 شبیه سازی ماشین القایی سه فاز با استفاده ازتبدیل 3 به 2
موتور های القایی :
نوعی از موتور جریان متناوب موتور AC آسنکرون (غیرهمزمان) است که توان مورد نیاز در قسمت متحرک آن از طریق القای الکترومغناطیسی تأمین میشود.

در این شبیه سازی با کد نویسی در نرم افزار متلب شبیه سازی ماشین القایی با استفاده از تبدیلات 3 محوری به 2 محوری انجام گرفته است :
این شبیه سازی مربوط به درس ماشین های الکتریکی کراوز (تئوری جامع) میباشد.

شبیه سازی با نرم افزار MATLAB
مبلغ : 400,000R
03 شبیه سازی مبدل بوست ایده آل و غیر ایده آل AVERAGE MODEL
این شبیه سازی شامل فایل های زیر می باشد :
- شبیه سازی مبدل بوست ایده آل در نرم افزار PSIM
- شبیه سازی مبدل بوست غیر ایده آل در نرم افزار PSIM
- شبیه سازی مبدل بوست ایده آل در نرم افزار MATLAB توسط روش AVERAGE MODELING بهمراه معادلات حالت
- شبیه سازی مبدل بوست غیر ایده آل در نرم افزار MATLAB توسط روش AVERAGE MODELING بهمراه معادلات حالت
- فابل ورد شبیه سازی و مقایسه نتایج
شماتیک مدار :

نتیجه شبیه سازی:

شبیه سازی در نرم افزار های matlab , psim
مبلغ : 500,000R