شبیه سازی های درایو های الکتریکی
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نماییدشبیه سازی های درایو های الکتریکی
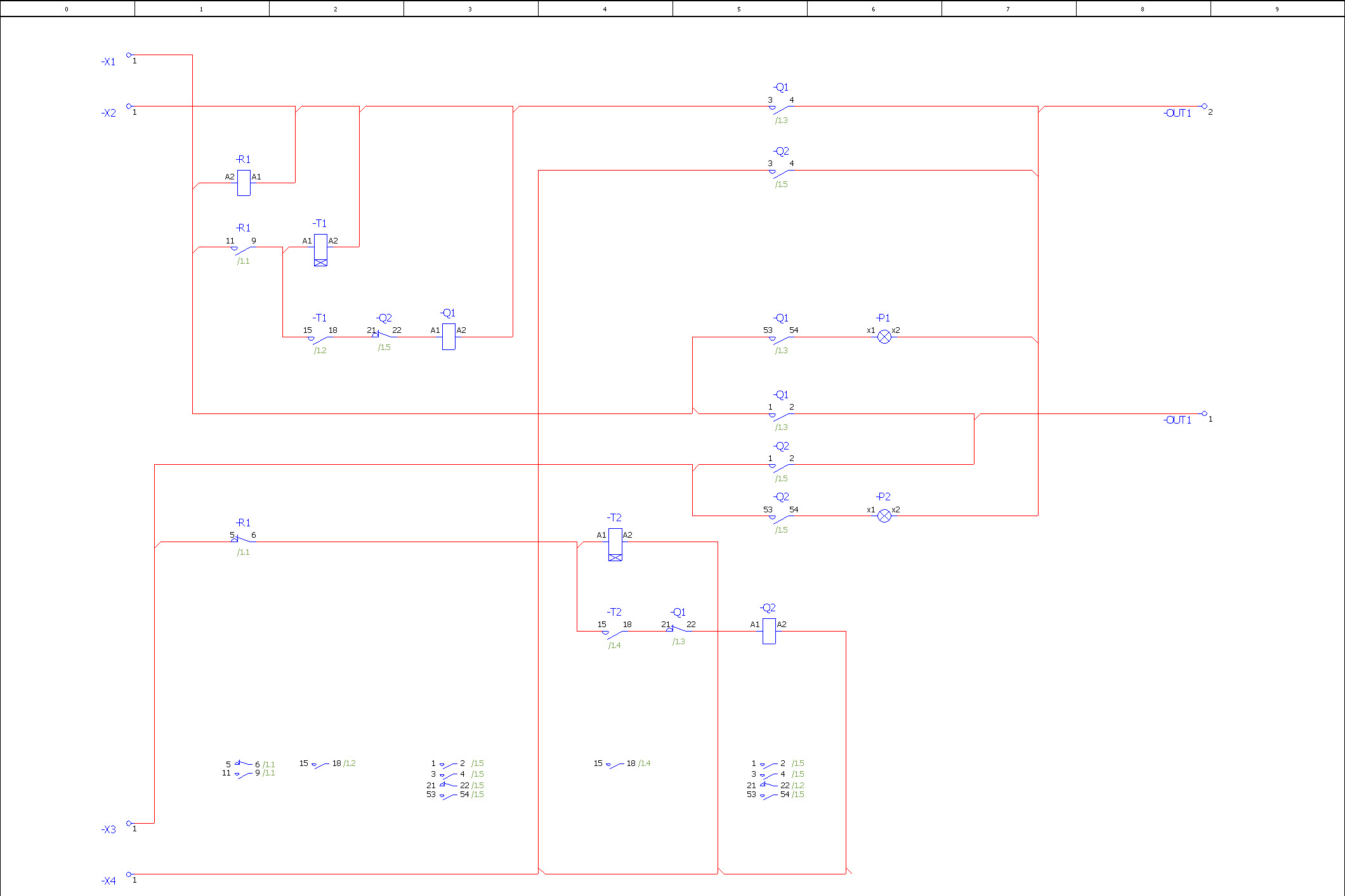
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نمایید17 آموزش : نحوه ساخت کلید چنج آور اتوماتیک تکفاز ( نقشه مداری کلید چنج آور )
بمنظور برقراری و تامین برق ثانویه نیاز به یک تابلویی به نام ATS(AUTOMATIC TRANSFER SWITCH ) می باشد که توسط این تابلو می توان تعیین کرد تا زمانیکه برق شهر در مدار هست مصرف کننده از این برق استفاده کند و در غیر این صورت منبع ثانویه ( ژنراتور یا UPS ) در مدار قرار گیرند . در این تابلو باید وقفه ای بمنظور عدم تداخل دو فاز قرار گیرد لذا از دو تایمر نیز در این مدار استفاده کرده ایم. در این ویدیو شما با نحوه ترسیم و تحلیل مدار آشنا خواهید شد
50 شبیه سازی ماشین القایی به همراه کنترلر pi بمنظور کنترل سرعت
تغییر در سرعت ماشین های القایی توسط تغییر در فرکانس انجام می شود. ولی در حین تغییر فرکانس باید نسبت v/f ثابت باشد تا شار در هسته بالا یا پایین نرود. بدین منظور روشی جهت تنظیم سرعت ماشین القایی توسط کنترلر pi در نرم افزار psim طراحی گردیده است .
شماتیک مدار :

پاسخ سرعت :



شبیه سازی با نرم افزار psim
مبلغ : 450,000 R
16 : آموزش ساخت برد شارژر چراغ اضطراری
چراغ های اضطراری چینی معمولا دارای برد شارژر الکترونیکی هست این برد ها دارای منبع تغذیه ضعیفی هستند که در صورت دشارژ شدن باتری قابلیت تامین برق مورد نیاز باتری را نداشته و لذا منبع تغذیه ولتاژ ناسالم تولید می کنند و هم به باتری و هم بر LED ها آسیب می زند لذا برا آن شدیم راهکار ساده پیشنهاد دهیم
نکته قابل تامل اینکه تولید کننده داخلی چراغ اضطراری با نام تجاری همای ... که از ذکر نام کامل آن خودداری می کنم قبلاً منابع تغذیه ترانسی بر روی چراغ های اضطراری قرار میداد که عمر تجهیز را خوب نگه می داشت ولی اکنون مشابه برد های چینی برد بدون ترانس تقسیم ولتاژی تولید می کنند که اصلا کیفیت نداشته و قیمت بالایی هم دارند لذا به خرید این تجهیز توصیه نمی شود
حال توصیه اینجانب به استفاده از باتری های شارژی لیتیوم هست
معمولا پنل LED چراغ های اضطراری چینی و ایرانی با ولتاژ ۳ یا ۶ ولت کار می کنند
جهت تست سلامت پنل دو سر سیم را با این ولتاژ ها تست کنید تا هم از ولتاژ کاری صفحه اطمینان حاصل شود و هم از سلامت آن
در صورت سالم بودن صفحه به روش زیر عمل کنید
اگر ولتاژ کار پنل ۳ ولت باشد از یک باتری لیتیوم ۳.۷ ولت به همراه شارژر
اگر ولتاژ کار پنل ۶ ولت باشد از دو باتری لیتیوم سری شده و شارژر دو سل جهت شارژ استفاده نمایید
حال دو سر باتری را به پنل متصل کرده ولی در مسیر آن یک مقاومت پنج اهم پنج وات آجری و یک کلید جهت روشن و خاموش شدن پنل در مسیر قرار دهید
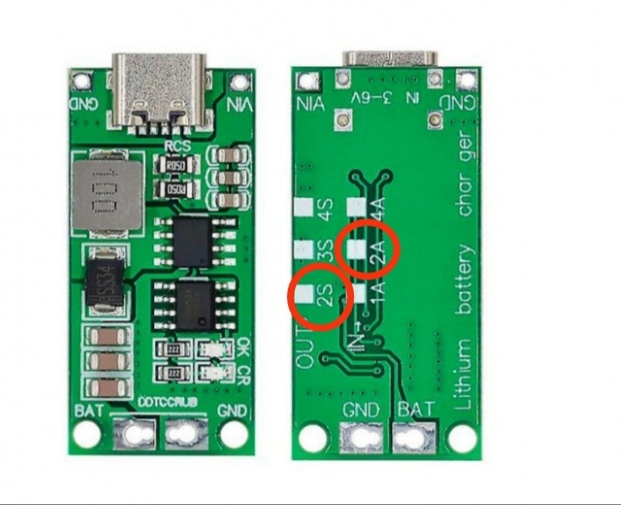
در صورت نیاز به ساخت شارژر اتوماتیک باتری لیتیوم به روش زیر اقدام نمایید
باتری شارژر لیتیوم :

دقت کنید پایه های ورودی این برد را بصورت جابجا وصل نکنید تا منجر بود سوختن برد نگردد.
رله :

مدار :

مدار چاپی :


49 شبیه سازی اینورتر تکفاز کنترل کننده جریان توسط کنترل کننده PID
اینورتر های تکفاز معمولا توسط H-BRIDGE که شامل 4 سوییچ می باشد ، کنترل می شوند روش مرسوم در مورد کنترل گیت های این سوییچ ها روش PWM است که در آن یک موج سینوسی با یک موج دندانه اره ای با فرکانس حداقل 10 برابر فرکانس شکل موج اصلی مقایسه می شود و خروجی مقایسه کننده به عنوان کنترل کننده گیت می باشد. در این شبیه سازی ما جهت کنترل گیت ها از کنترلر PID به همراه مقایسه کننده باند هیسترزیس بهره می گیریم که شکل مدار بفرم زیر می باشد :

نتیجه شبیه سازی :


شبیه سازی با نرم افزار matlab
25000 ت
48 شمارنده زوج شمار نزولی 3 بیتی یا 4 بیتی
در این شبیه سازی با استفاده از چند فلیپ فلاپ می توان یک شمارنده زوج شمار نزولی سه بیتی یا چهار بیتی طراحی کرد
این پروژه شامل فایل آموزشی شامل نحوه طراحی مدار سنکرون بوده که فایل شبیه سازی آن نیز ضمیمه می باشد
مدار :

شبیه سازی با نرم افزار PROTEUS
بهمراه فایل آموزشی pdf
15000 ت
47 شمارنده صعودی سنکرون از 0 الی 9
شمارنده های سنکرون توسط فلیپ فلاپ باید طراحی شوند لذا در این شبیه سازی علاوه بر فایل شبیه سازی یک فایل آموزشی تهیه شده که این مدار می تواند اعداد 0 الی 9 را شمارش کرده و این عمل را دوباره تکرار کند
مدار :

شبیه سازی با نرم افزار PROTEUS
بهمراه فایل آموزشی pdf
15000 ت
46 شمارنده نزولی آسنکرون توسط فلیپ فلاپ j-k
شمارنده های منطقی در دو مدل سنکرون و آسنکرون طراحی می شوند شمارنده های آسنکرون معمولا بصورت صعودی یا نزولی طراحی می شوند و در مواردی که قرار است یک سری عدد غیر ترتیبی نمایش داده شوند، شمارنده های سنکرون کارایی بالاتری دارند.
در این مدار یک شمارنده نزولی آسنکرون بهمراه 4 فلیپ فلاپ طراحی می شود که از عدد 8 الی 0 را شمارش می کند
مدار :

شبیه سازی با نرم افزار PROTEUS
هزینه شبیه سازی 15000 ت
45 شمارش شماره دانشجویی توسط فلیپ فلاپ
همانگونه که می دانید توسط فلیپ فلاپ ها می توان انواع شمارنده را طراحی کرد شمارنده ها معمولا بصورت نزولی یا صعودی کار میکنند بمنظور نمایش اعداد 0 الی 9 بر روی 7segment باید از 4 فلیپ فلاپ استفاده کرد
شمارنده ها در دو مدل سنکرون و آسنکرون کار کرده و می توان آنها را بصورت ترتیبی regular و یا غیر ترتیبی irregular استفاده کرد
شماره دانشجویی از مدل irregular بوده ضمن اینکه تکرار اعداد نیز در آن مشهود می باشدبرای اینکه از تکراری بودن اعداد جلوگیری کنیم می بایست یک یا دو بیت به اعداد اضافه کرد یعنی با 5 یا 6 فلیپ فلاپ کار می کند
در این پروژه با استفاده از 6 فلیپ فلاپ می توان شماره دانشجویی تا 4 تکرار در یک عدد خاص را شبیه سازی نمود
مدار بهمراه پاسخ:

شبیه سازی با نرم افزار PROTEUS
هزینه شبیه سازی 45000 ت . فایل آموزشی PDF بمبلغ 20000 ت
هزینه شبیه سازی برای شماره دانشجویی خاص : 85000 ت
۴۴ کنترل دور ماشین القایی توسط کنترل مقاومت استاتیکی
بمنظور کنترل سرعت ماشین های القایی راههای مختلفی وجود دارد ولی با پیدایش این ماشین ها ، اولین روشی که ارایه گردید روش قرار دادن مقاومت بر سر راه روتور موتور های القایی روتور سیم پیچی شده بوده است :

با قرار دادن مقاومت بر سر راه روتور عملا گشتاور افزایش پیدا کرده ولی سرعت کاهش پیدا می کند ولی با توجه به اینکه بخشی از جریان القا شده روی روتور بواسطه عبور از روتور ، باعث ایجاد اتلاف انرژی می شود. لذا به مرور زمان این روش کاربرد های محدود تری پیدا کرد ولی همپنان یکی از روش های ساده و کم هزینه نسبت به روش های کنونی می باشد.
نمودار سرعت گشتاور موتور القایی در حضور مقاومت :

حال در این شبیه سازی می خواهیم سرعت ماشین القایی را به روش مقاومت استاتیکی کنترل نماییم :
بلوگ دریاگرام مدار :

پاسخ مدار :

شبیه سازی با نرم افزار matlab
بهمراه فایل پاور پوینت
50000 ت
۴۳ کنترل دور موتور dc توسط جریان توسط باند هیسترزیس
همانطور که می دانیم ماشین های الکتریکی dc توسط تغییر ولتاژ سمت ارمیچر سرعتشان تغییر می کند . حال ما در این شبیه سازی با کنترل جریان ، سرعت را کنترل می کنیم . کنترلر به کار رفته در این شبیه سازی کنترلر هیسترزیس می باشد.
شماتیک مدار :

پاسخ :

شبیه سازی با نرم افزار psim
مبلغ : 300,000R
14 آموزش اتصال پنل آیفون کوماکس به مانیتور الکتروپیک
سیم بندی آیفون کوماکس :

شماره کانکتور های آیفون الکترو پیک قدیمی

ادامه مطلب ...
13 آموزش ساخت چراغ قوه توسط led power 3 w
در این پست می خواهیم یک مدار ساده جهت ساخت چراغ قوه LED را نمایش دهیم:
LED POWER 1W جریان مجاز 350 میلی آمپر و LED POWER 3W جریان مجاز 650 میلی آمپرمصرف می کند
ولتاژ مورد نیاز LED ها :

تجهیزات :
LED POWER 3W WHITE

ادامه مطلب ...
12 آموزش راه اندازی ماژول sim800c

دانلود کتابخانه GSM MODULE جهت نرم افزار PROTEUS
دانلود دیتاشیت های ماژول SIM 800 , SIM900
نحوه اضافه کردن کتابخانه به آردویینو

39 شبیه سازی شبکه شعاعی 69 باسه
در شبکه های انتقال قدرت که طول مسیر بالاست و مقدار مقاومت اهمی چندین برابر راکتانس سلفی است ، معمولا شبیه سازی سیستم قدرت در نرم افزار متلب توسط روش تکراری نیوتون رافسون و یا گوس سایدل انجام پذیر است ولی در شبکه های سیستم توزیع با توجه به اینکه فاصله مصرف کننده ها کم است ، مقدار مقاومت اهمی و راکتانس سلفی تفاوت چندانی با هم نداشته لذا در اینگونه سیستم ها از روش پیشرو یا پسرو استفاده می شود.
در شبکه های شعاعی سیستم 33 باسه و 69 باسه طبق استاندارد IEEE لحاظ می شود که اطلاعات ورودی این شبکه ها از مسیر زیر قابل دانلود می باشد.
در این شبیه سازی شبکه 69 باسه مورد مطالعه قرار می گیرد و ولتاژ هر باس به همراه جریان ورودی به هر باس استخراج می گردد.
دیاگرام 69 باسه:

پاسخ :

شبیه سازی با نرم افزار متلب MATLAB
هزینه شبیه سازی 45000 ت
هزینه فایل آموزشی بفرمت pdf به قیمت 20000 ت
42 بررسی تاثیر صفر کنترل کننده بر روی ماشین DC با فیدبک سرعت
همانگونه که می دانید معادلات ماشین DC از سری معادلات مرتبه دوم طبق بلوک دیاگرام زیر است :

حال در صورتیکه یک کنترلر PI در مدار اضافه کنیم ، یک قطب و یک صفر به سیستم اضافه می شود لذا در این شبیه سازی میخواهیم تاثیر تغییر در مکان این صفر در پاسخ معادله را بررسی کنیم .
مدار :

پاسخ :

شبیه سازی با نرم افزار PSIM
هزینه شبیه سازی به همراه فایل آموزشی PDF بمبلغ 45000 ت
41 شبیه سازی شبکه شعاعی 36 باسه
در شبکه های انتقال قدرت که طول مسیر بالاست و مقدار مقاومت اهمی چندین برابر راکتانس سلفی است ، معمولا شبیه سازی سیستم قدرت در نرم افزار متلب توسط روش تکراری نیوتون رافسون و یا گوس سایدل انجام پذیر است ولی در شبکه های سیستم توزیع با توجه به اینکه فاصله مصرف کننده ها کم است ، مقدار مقاومت اهمی و راکتانس سلفی تفاوت چندانی با هم نداشته لذا در اینگونه سیستم ها از روش پیشرو یا پسرو استفاده می شود.
در شبکه های شعاعی سیستم 33 باسه و 69 باسه طبق استاندارد IEEE لحاظ می شود که اطلاعات ورودی این شبکه ها از مسیر زیر قابل دانلود می باشد.
در این شبیه سازی شبکه 36 باسه مورد مطالعه قرار می گیرد و ولتاژ هر باس به همراه جریان ورودی به هر باس استخراج می گردد.

پاسخ :

شبیه سازی با نرم افزار متلب MATLAB
هزینه شبیه سازی 45000 ت
هزینه فایل آموزشی بفرمت pdf به قیمت 20000 ت