شبیه سازی های درایو های الکتریکی
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نماییدشبیه سازی های درایو های الکتریکی
در این وبلاگ می توانید شبیه سازی درایو های الکتریکی را دریافت نمایید37 شبیه سازی سیستم کنترل حرکت هواپیما
در این روش در ابتدا معادلات سیستم را به حوزه لاپلاس برده و پاسخ پله ، پاسخ ضربه ، پاسخ پله در حضور اغتشاش ، دیاگرام بود ، منحنی مکان ریشه و دیاگرام نایکوییست به روش کدنویسی و سیمولینک در نرم افزار متلب رسم شده و نهایتا یک کنترلر PID برای سیستم طراحی می شود که این کنترلر تمامی انتظارات مورد نیاز نظیر ماکزیمم جهش ، زمان خیز (نمو) و زمان نشست را نیز می تواند براورده کند.
در این شبیه سازی از ابزار های نرم افزار متلب نظیر SISO TOOL , PID TUNING جهت سیستم کنترلی استفاده شده است.


شبیه سازی با نرم افزار متلب MATLAB
هزینه شبیه سازی 55000 ت
هزینه فایل PDF در 35 صفحه 35000 ت
هزینه فایل WORD در 35 صفحه 85000 ت
جزوه 1: دانلود جزوه آموزشی نظام مهندسی تاسیسات برقی
این جزوه شامل نکات کلیدی و کاربردی آزمون های ورودی به نظام مهندسی بوده که بصورت pdf در بیش از 400 صفحه تهیه شده است .
نکات مهم آزمون های سال 1380 الی 1401 در این جزوه گرد آوری شده تا دانشجویان بتوانند در اسرع وقت به این نکات دسترسی داشته باشند.
از مزیت های این جزوه می توان به قابلیت سرچ فارسی آن اشاره کرد.
دانشجویان بایستی جهت استفاده از این جزوه آنرا پرینت گرفته و با خود سر جلسه ببرند.
کلید واژه منحصربفرد این جزوه شما را در کمترین زمان ممکن به پاسخ هدایت خواهد کرد
این نکته مد نظر دانشجویان باشد که حداقل 50 درصد سوالات آزمون های نظام مهندسی در سال های قبل عینا و یا با تغییرات جزیی تکرار می شوند
در صورتیکه نواقصی در این فایل مشاهده نمودید لطفا اطلاع دهید تا در ویرایش های بعدی اصلاح گردند. با تشکر

منابع آزمون :


هزینه دانلود جزوه : 20,000 تومان

دانلود رایگان بخشی از جزوه ویرایش 174
برای دانلود جزوه به صورت کامل با شماره داخل عکس تماس بگیرید
ادامه مطلب ...آموزش 10 : نحوه اضافه کردن کتابخانه اردویینو در پروتیوس PROTEUS
فایل های زیر را دانلود کرده :
سپس فایل های با پسوند idx , .lib . را در مسیر زیر قرار دهید:

36 : ساخت دماسنج بهمراه کنترل فن /Lm35 + Arduino
همانگونه که می دانید سنسور های مختلفی جهت نمایش دما در بازار موجود هستند که سنسور Lm35 به دلیل نسبت کیفیت به قیمت در جایگاه ویژه ای قرار دارد لذا در این شبیه سازی از این سنسور بمنظور نمایش دما استفاده شده است.
همانگونه که در عکس میبینید ، این شبیه سازی دارای ویژگی های زیر است :
استفاده از برد َArduino
استفاده از سنسورLm35
برنامه نویسی با زبان Arduino
شبیه سازی در محیط نرم افزار Proteus

شبیه سازی با نرم افزار Proteus
مبلغ : 350,000 R
آموزش 9 : نحوه کار با 7SEGMRNT در برنامه نویسی AVR
در این آموزش نحوه کار با 7SEGMRNT و نحوه برنامه نویسی آن با میکرو کنترلرAVR آموزش داده شده است :

آموزش 8 : آموزش نحوه ساخت ماتریس ادمیتانس شبکه
همانگونه که می دانید بدست آوردن ماتریس ادمیتانس شبکه ابتدایی ترین مرحله جهت پخش بار سیستم است لذا در این بخش نحوه ساخت ماتریس ادمیتانس ارایه شده است:

35 محاسبات پخش بار شبکه 8 باسه طبق استاندارد IEEE
شبکه تحت مطالعه در این پروژه شبکه 8 باسه طبق استاندارد IEEE می باشد :

در این شبیه سازی ابتدا اطلاعات سیستم از جمله امپدانس خطوط و میزان قدرت تحویلی ژنراتور ها و نیز میزان بار مصرفی بار ها به برنامه داده می شود و سپس برنامه Ybus , ,Zbus را محاسبه کرده و سپس به روش گوس سایدل معادلات را حل کرده که نهایتا ولتاژ و زاویه هر باس بار نمایش داده خواهد شد.
شبیه سازی با نرم افزار متلب
مبلغ : 550,000 R
34 بدست آوردن نتایج اتصال کوتاه در یک سیستم 8 باسه
همانطور که در شبیه سازی قبلی مشاهده نمودید یک شبکه 8 باسه تحلیل گردید که نتایج آن گامی جهت بدست آوردن نتایج اتصال کوتاه در هر باس است.
در این شبیه سازی پس از بدست آوردن نتایج معادلات پخش بار , بر روی هر باس یک اتصالی ایجاد کرده و جریان عبوری از رله های اصلی و پشتیبان محاسبه می گردد تا مشاهده کنیم هر رله بر روی چه مقداری می بایست تنظیم نمود تا شبکه کمترین آسیب را در موقع اتصال کوتاه سه فاز به زمین داشته باشد.
شبیه سازی با نرم افزار متلب
مبلغ : 850,000 R
33 محاسبات پخش بار شبکه 8 باسه طبق استاندارد IEEE
شبکه تحت مطالعه در این پروژه شبکه 8 باسه طبق استاندارد IEEE می باشد :
در این شبیه سازی ابتدا اطلاعات سیستم از جمله امپدانس خطوط و میزان قدرت تحویلی ژنراتور ها و نیز میزان بار مصرفی بار ها به برنامه داده می شود و سپس برنامه Ybus , ,Zbus را محاسبه کرده و سپس به روش نیوتون رافسون معادلات را حل کرده که نهایتا ولتاژ و زاویه هر باس بار نمایش داده خواهد شد.
شبیه سازی با نرم افزار متلب
مبلغ : 550,000 R
32 برنامه تولید Zbus و Ybus از روی شبکه امپدانسی
همانطور که می دانید بمنظور معرفی شبکه های قدرت از دور روش مرسوم امپدانسی و ادمیتانسی استفاده می شود که در شکل زیر نمونه ادمیتانسی را مشاهده می کنید:

بمنظور بدست آوردن Ybus یا Zbus در ابتدا کافی است شبکه را بصورت ادمیتانسی تبدیل کرده و سپس Ybus را محاسبه و با معکوس کردن Ybus به Zbus دست یافت.
لازم بذکر است در برنامه مذکور تعداد باسها ابتدا از کاربر گرفته می شود و سپس با وارد کردن اطلاعات ورودی توسط کاربر نتایج نمایش داده خواهند شد.
شبیه سازی با نرم افزار متلب:
مبلغ : 100,000 R
ضمایم :
فایل آموزشی به فرمت PDF
مبلغ : 80,000 R
31 شبیه سازی کنترل سطح مایعات در مخزن
همانگونه که می دانیم کنترل کننده ها در اکثر پروسه های الکتریکی و مکانیکی جای خود را باز کرده و دیگر بجای انسان ، کنترل فرایند را
این کنترل کننده های در دست گرفته اند.
ابتدایی ترین کنترلی که وارد سیستم کنترلی شد روش on/off بود که در این روش خطای نهایی شدید و نوسانی خواهد بود که فقط به دلیل
ارزان بودن این روش، هنوز در سیستم هایی از این روش استفاده می گردد.نظیر سماور برقی
ولی با پیشرفت تکنولوژی کنترلر های جدیدی نظیر pid کنترلر وارد بازار شدند که مزیت های بیشتری نسبت به روش قبلی دارند.
در این شبیه سازی ابتدا در محیط سیمولینک یک سیستم کنترلر کنترل سطح مایع را شبیه سازی کرده و سپس از طریق کد نویسی دیاگرام بود
، نایکوییست و دیاگرام مکان ریشه را رسم می نماییم.

پاسخ :


شبیه سازی با نرم افزار متلب
مبلغ : 350,000 R
30 کنترل تجهیزات توسط arduino _ bluetooth
سخت افزار اردویینو نسخه تکمیل یافته AVR هست که زبان برنامه نویسی آن نیز مختص اردویینو هست.
تجهیزاتی که در ارتباط با اردویینو ساخته شده اند طیف وسیع و آسانی را مهیا کرده اند . از جمله این تجهیزات می توان به ماژول بلوتوث اشاره کرد .
در این برنامه نویسی ما برنامه ای می نویسیم که بتوان توسط آن از طریق گوشی همراه اندرویدی ، روشن یا خاموش بودن تجهیزات را کنترل کرد.


هزینه کد نویسی : 20000 ت
29 شبیه سازی کنترل کننده دما
همانگونه که می دانیم کنترل کننده ها در اکثر پروسه های الکتریکی و مکانیکی جای خود را باز کرده و دیگر بجای انسان ، کنترل فرایند را
این کنترل کننده های در دست گرفته اند.
ابتدایی ترین کنترلی که وارد سیستم کنترلی شد روش on/off بود که در این روش خطای نهایی شدید و نوسانی خواهد بود که فقط به دلیل
ارزان بودن این روش، هنوز در سیستم هایی از این روش استفاده می گردد.نظیر سماور برقی
ولی با پیشرفت تکنولوژی کنترلر های جدیدی نظیر pid کنترلر وارد بازار شدند که مزیت های بیشتری نسبت به روش قبلی دارند.
در این شبیه سازی ابتدا در محیط سیمولینک یک سیستم کنترلر دما را شبیه سازی کرده و سپس از طریق کد نویسی دیاگرام بود
، نایکوییست و دیاگرام مکان ریشه را رسم می نماییم.
نرم افزار 2 : دانلود نرم افزار PSIM
لینک دانلود :
![]()
راهنمای نصب :
1 : فولدر مکان نصب برنامه را در حین نصب تغییر ندهید
2 :در حین نصب از شما سوال پرسیده می شود در مورد لایسنس
از فایل PSIM.LIC واقع در همان فولدر اصلی نصب برنامه استفاده و آدرس دهی کنید
پس از اتمام فرایند نصب به فولدر اصلی برنامه روید
در داخل فولدر Standalone License files دو فایل هست این دو را کپی کنید و در
همان مسیر نصب برنامه (WINDOWS 10) :
C:\Program Files (x86)\Powersim\PSIM9.0.3_Trial
جای گذاری کنید .
حال از این دو فایل برنامه Register PSIM.reg را اجرا کنید تا مراحل کرک تکمیل گردد.
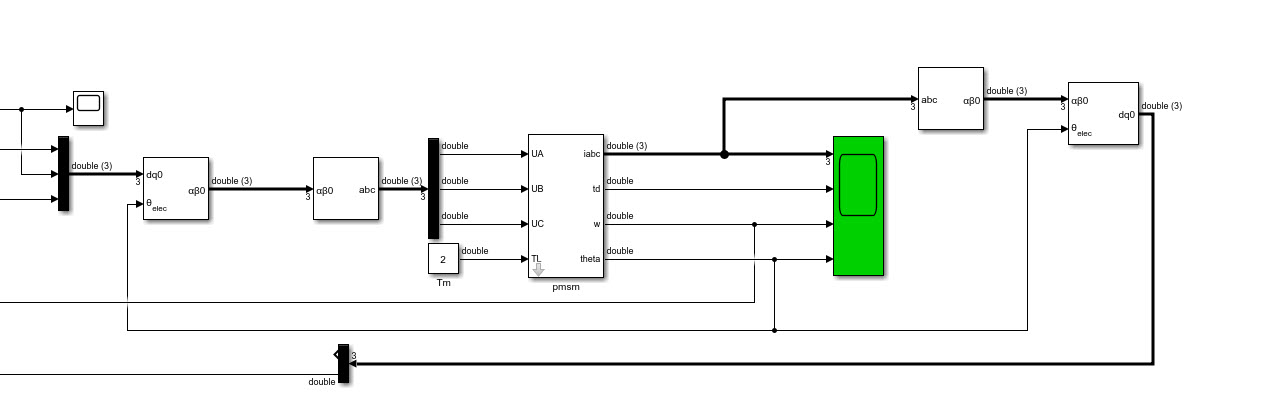
28 شبیه سازی موتور pmsm با استفاده از تبدیلات پارک و کلارک در نرم افزار matlab
سیمپیچی استاتور در موتورهای سنکرون آهن ربای دائم همانند سیم پیچی موتورهای القایی و موتورهای BLDC است. این سیم پیچی می تواند به صورت توزیع شده و یا متمرکز باشد. روتور این موتورها همانند موتور BLDC سیمپیچ نداشته و بسته به نحوه قرارگیری آهنربا در رتور می تواند دارای ساختارهای مختلفی شامل آهن ربای سطحی، آهن ربای داخلی و آهن ربای دفن شده باشد. در شکل زیر استاتوری به سیم پیچ توزیع شده و روتوری با آهن ربای سطحی نشان داده شده است.
ادامه مطلب ...
27 کنترل سرعت ماشین القایی با کنترلر PID
همانطور که می دانیم کنترل سرعت در ماشین القایی توسط تنظیم فرکانس ولتاژ ورودی صورت می گیرد . پس می توان با تغییر فرکانس حول فرکانس نامی سرعت را کم یا زیاد نمود.
لازم بذکر است که با کاهش فرکانس و ثابت ماندن ولتاژ نامی به علت افزایش شار در هسته ، گرمای هسته زیاد شده و باعث سوختن موتور می شود.
می دانیم شار هسته متناسب است با V/f
در این مدار کنترلی که با نرم افزار متلب شبیه سازی شده است ، علاوه بر کنترل سرعت ماشین القایی ، تغییر در گشتاور بار خروجی نیز با تغییر در فرکانس ورودی منجر به ثابت ماندن سرعت موتور می شود.
مدار کنترلی :

پاسخ مدار :

شبیه سازی توسط نرم افزار matlab
هزینه شبیه سازی: 350,000R
26 کنترل سرعت ماشین القایی در اثر تغییر در گشتاور بار
همانطور که می دانیم کنترل سرعت در ماشین القایی توسط تنظیم فرکانس ولتاژ ورودی صورت می گیرد . پس می توان با تغییر فرکانس حول فرکانس نامی سرعت را کم یا زیاد نمود.
لازم بذکر است که با کاهش فرکانس و ثابت ماندن ولتاژ نامی به علت افزایش شار در هسته ، گرمای هسته زیاد شده و باعث سوختن موتور می شود.
می دانیم شار هسته متناسب است با V/f
در این مدار کنترلی که با نرم افزار متلب شبیه سازی شده است ، نه تنها سرعت مطلوب توسط کنترلر PID کنترل می شود بلکه در اثر تغییر در بار موتور نیز این سرعت به همان سرعت مطلوب نزدیک می شود.
25 راه اندازی و کنترل دور ماشین القایی به روش V/F
همانطور که می دانیم کنترل سرعت در ماشین القایی توسط تنظیم فرکانس ولتاژ ورودی صورت می گیرد . پس می توان با تغییر فرکانس حول فرکانس نامی سرعت را کم یا زیاد نمود.
لازم بذکر است که با کاهش فرکانس و ثابت ماندن ولتاژ نامی به علت افزایش شار در هسته ، گرمای هسته زیاد شده و باعث سوختن موتور می شود.
می دانیم شار هسته متناسب است با V/f
در این مدار کنترلی که با نرم افزار متلب شبیه سازی شده است ، می توان با تنطیم نسبت V/f از آسیب دیدن هسته جلوگیری نمود.
مدار کنترلی :

پاسخ مدار :

شبیه سازی توسط نرم افزار matlab
هزینه شبیه سازی: 200,000R
24 کنترل دور ماشین dc توسط کنترل کننده فازی
بمنظور کنترل سرعت ماشین dc لازم است تا ولتاژ یا جریان آرمیچر که رابطه مستقیمی با سرعت دارند ، کنترل شوند.
بدین منظور در این روش از کنترل کننده فازی در محیط نرم افزار متلب شبیه سازی را انجام داده ایم :

شبیه سازی توسط نرم افزار matlab
هزینه شبیه سازی: 300,000R